


te muestro ahora, cómo puede hacer mover el servo a las señales de Audio.
Ver en este video cómo se ve como:
Piezas que necesita:
-Arduino
-una resistencia de 1K
-un Servo
-1 LED
-4 cables de puente
-3,5 pinout conector de audio (como que uno de los auriculares comunes por ejemplo)
-opcional un soldador o un otro método para hacer una buena conexión eléctrica
Paso 1:
Corte uno del puente de alambre en dos partes.
(yo usé un cuttet ya habia uno, por lo tanto, los diferentes colores en la imagen)
Paso 2:
tira el pinout del conector de audio 3.5, hasta que pueda ver los 3 alambres:
shud ver, uno para el lado izquierdo, lado derecho y del suelo.
Usted necesita solamente uno de los L y R
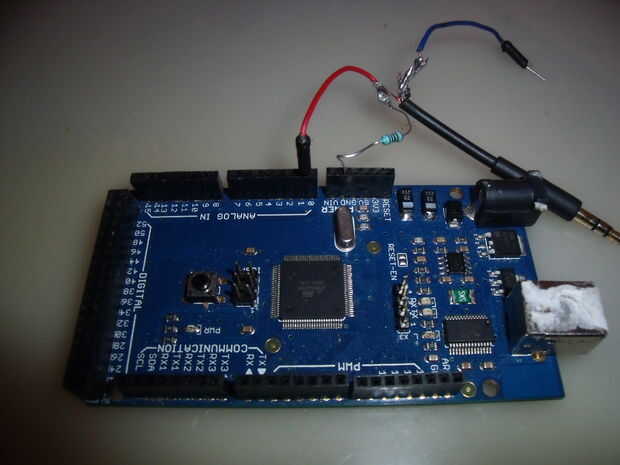
ahora la soldadura uno paz del alambre cuttet para el
final del resitor, luego en el mismo punto de la resistencia de la soldadura y alambre para el elegido del alambre L & R
shud se parecen a esto:
(Nota sobre la fotografía soldar un cable de otro, que era un proyecto de stero, en este tutorial usted puede ignorar el segundo alambre sin
resistor).
Paso 3:
Conecte el resitor a tierra en el Ardurino y el extremo del cable al Pin analógico 0. Por cierto el otro lado puede ser pluged en cualquier sonido
Fuente, el teléfono, reproductor de cd etc... en mi caso su mi tarjeta de sonido.
Conectar Ardurino con tu pc abre el software de Ardurino y abierta bajo archivo > ejemplos > 01 Basic > el boceto de "AnalogReadSerial"
y suba.
Inicio el Serial Monitor (Herramientas > Serial Monitor) y asegúrese de que su SoundSorce es salida de señales.
Si ves en el Serial Monitor lecturas caóticas o solamente un cero no cambiando, usted equivocamos, sus lecturas están equivocadas,
Si ves las lecturas que más alto con soundsignal más fuerte y a un menor número en partes no tan fuertes tienes razón.
que parece un poco a matrix, sólo ves un numbur pero su realmente bueno para ver que se trata de sonido incluso si no se oye nada.
Paso 4:
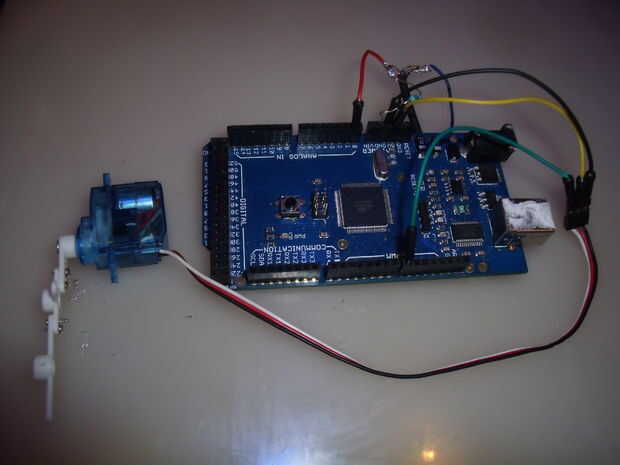
Allright lo hora de conectar el Servo uso los otros puente de 3 cables para,
el servo hase una roja, que se conecte a + 5v en arduino
uno negro, este se va a tierra a arduino
y blanco Conecte éste al Pin 9 en el arduino (9 es un PWM PIN eso es necesario para un Servo)
Tome ahora el led y el Monte sin embargo en ese servo, conectar el smaler - Pin del LED a tierra de Ardurino
y el + ya pin Pin 12 en el Ardurino.
Paso 5:
Algunos Codeing...
iniciar un nuevo Skatch
Agregue el código siguiente:
Subir y divertirse, usted como voto para mí y no dude en mostrar sus proyectos con este método :)
/* Algunos Varuables que necesitamos myservo.Attach(ServoPin); una y otra vez funciona para siempre la rutina bucle: Maping la misma lectura un poco poco más abajo para calcular el tiempo de que tu servo llega a hacer un movimiento
Realizar un movimiento de Servo en sonido.
Este ejemplo de código es de dominio público.
2012 por Cenk Özdemir
*/
para cosas de servo incluimos la librería servo
#include < Servo.h >
crea un objeto servo
Servo myservo;
int ServoPin = 9;
int SoundInPin = A0;
int LedPin = 12;
la rutina de instalación se ejecuta una vez al presionar reset:
void setup() {}
inicializar
pinMode (SoundInPin, entrada);
pinMode (LedPin, salida);
}
void loop() {}
leer la entrada en el pin analógico 0:
int sensorValue = analogRead(SoundInPin);
que Maop un valor tro de este LED que puede ser un número entero entre 0..255
int LEDValue = map(sensorValue,0,512,0,255);
Nosotros mapa de aquí abajo a la gama posible de servo moovment.
sensorValue = map(sensorValue,0,512,0,180);
Nota normalmente el 512 es 1023 becouse de lectura analógica shud ir tan lejos, pero que para obtener mejores lecturas cambié.
myservo.Write(90);
colocar el servo en posición estándar
int MoveDelayValue = map(sensorValue,0,255,0,sensorValue);
Si (sensorValue > 33) {/ / cortar algunas lecturas estáticas sólo si la lectura es mayor entonces 33 it begings para trabajar
Delay(1); un retardo estático para suavizar las cosas...
ahora mueve el servo a la lectura asignada
myservo.Write(sensorValue);
activar led con el valor calculado para él
analogWrite (LedPin, sensorValue);
y hacer que se mueven en este tiempo de retardo
Delay(MoveDelayValue);
} / / Hacer. ahora cerramos esa parte.
desactivar el led nuevo.
analogWrite (LedPin, 0);
y esto repite todo el tiempo.
}













