Paso 3: Prueba de componentes
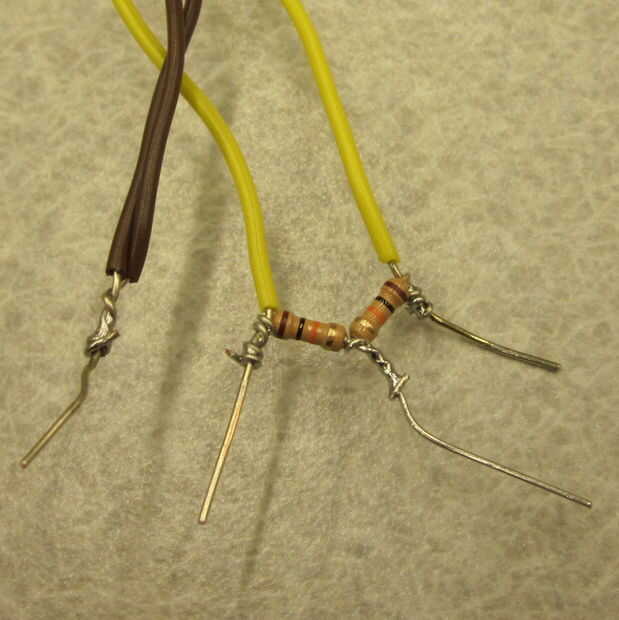
Los sensores de curva sirven como resistencias variables. Para nuestros propósitos, necesitamos una lectura de ellos. Por lo tanto tenemos que Solde un resistor de k 10 entre uno de los lados y tierra. De hecho, usando el sensor será mucho más fácil si usted conduce a cada uno de los pernos de la soldadura. Asegúrese de aislar las conexiones con tubos termocontraíbles o cinta aislante. Tenga en cuenta también que la unión entre el sensor de curva puede usar a través y romper, así que esto refuerza con cinta es una buena idea. El resistor, como se mencionó anteriormente, irá al suelo; el mismo pin que se suelda la resistencia irá a la analógica de entrada; y el otro pin de alimentación (5V). Conecte el sensor de curva en el arduino en esta configuración, con la entrada al pin A0. Configure el arduino para imprimir los valores de entrada analógicos. Si no está familiarizado con el software arduino, utilice el código siguiente. Ver qué tipo de valores se obtiene cuando usted dobla su sensor de flexión versus cuando el sensor es recta.
void setup()
{
Serial.Begin(9600); Serial de instalación
digitalWrite (13, HIGH); Indica que el programa ha desencadenar
}
void loop()
{
materia prima = analogRead(A0); Lee la entrada del PIN
Serial.println(RAW); Imprime el valor de entrada
Delay(10); Hacerlo no desplazarse demasiado rápido
}
En el siguiente paso, se hackear los servos de movimiento continuo. Por ahora, sin embargo, es una buena idea para asegurarse de que funcionan en el primer lugar. El cable naranja es señal, rojo es de alimentación (5V) y marrón es la tierra; de esta manera el gancho un servo hasta el arduino. Uno de los módulos de prueba de servo para asegurarse de que el servo se comporta como se esperaba. Necesita largo cables de los servos (por lo menos 1 yarda, dependiendo de cuánto será la línea de pesca suspende el móvil), así que ahora sería un buen momento para fijarlos deslizándolos en los pines correspondientes en el servo. Encontramos que trenzar los cables juntos ayudaron a mantenerlos consolidado y asegurado que sabíamos que los cables fueron a que componente.
Soldadura conduce a la energía tierra y pines de señal del acelerómetro. Enganchar el acelerómetro hasta el arduino, con la entrada a uno de los pines analógicos (por ejemplo, A0). Imprimir los valores crudos como hiciste los sensores de la curva. Prueba aprovechando el acelerometro y ver qué tipo de cambios en los valores se. Encontramos que dando el acelerómetro una buena sacudida tendía a hacer que nuestros números de entrada de tres dígitos a cuatro dígitos.
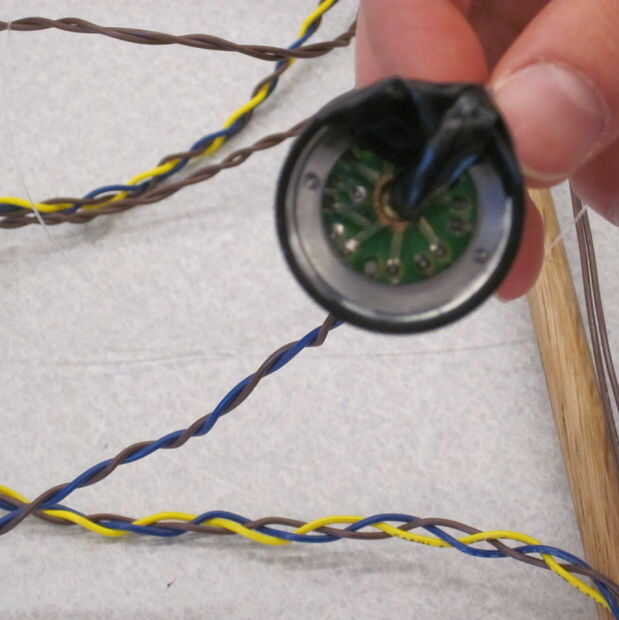
Tornillo de las cabezas de las dos linternas. La primavera en el centro de la cabeza corresponde a la energía y los hilos de metal alrededor del exterior corresponden a la tierra. Cuidadosamente la soldadura un cable largo a la primavera y mucho plomo a los hilos de tierra. (Necesita al menos 1,5 yardas de cada cable para llegar desde el extremo del móvil a la arduino). Enchufe el cable de tierra en un perno de la tierra y el cable en uno de los pines digitales. Cuando el pasador está en alta, la luz deberá encenderse, y cuando el pasador está en baja, la luz debe apagarse.
Soldadura largo conduce a cada extremo de cada uno de los LEDs, tomando nota de que conducir va a tierra y que lleva la señal. Prueba cada uno llevó igual cada linterna - Inserte el cable de tierra en un perno de la tierra y el cable de señal en un pin digital, luego asegurar el LED enciende al ajustar el perno alto y apaga al ajustar el perno bajo.
Todos los componentes eléctricos deben estar trabajando ahora, y a excepción de los servos de hacking y programación el XBees, debería estar listos para utilizar!











")

