Paso 6: Construir el movimiento detección Faro



La unidad de Faro está a cargo de la detección de movimiento. Se compone de un Arduino, un módulo transmisor de RF y una alarma de detección de movimiento modificado.
Pasos de la Asamblea (lista):
1.) Agarrar una tabla de prototipos, un Arduino, un módulo de RF transmisor (TX).
2.) hacer una investigación sobre el mapa de pin de su transmisor de RF.
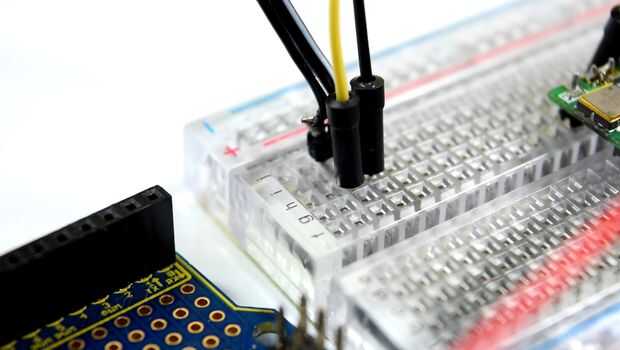
3.) Montar el transmisor de RF en la placa de prototipos.
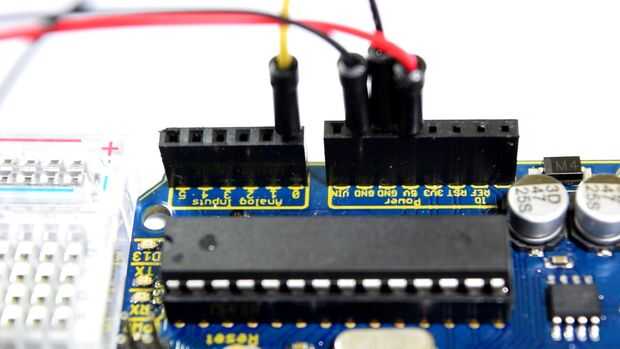
4.) Conecte un puente de VCC del transmisor RF al pin de 5v de Arduino.
5.) Conecte un puente de la tierra del transmisor RF con el conector de tierra de la Arduino.
6.) Conecte un puente de la salida digital del transmisor RF para el digital pin # 12 de Arduino.
7.) gancho agarrador su alarma de detección de movimiento modificado recientemente.
8.) Conecte el cable extendido de la alarma de detección de movimiento a la protoboard.
9.) Conecte un puente de la salida de altavoz de suelo de la alarma modificada con el conector de tierra de la Arduino.
10.) Conecte un puente de la salida de altavoz de la alarma modificada al pin analógico # 0 de Arduino +.
Cómo funciona:
Cuando movimiento es detectado por la alarma modificada, la alarma libera pulsos de tensión que hace el orador de la ballena. Esto significa que cuando la alarma detecta presencia, emite un voltaje de salida +. Al quitar el altavoz y golpeando a su salida, el arduino puede identificar señales analógicas que desprende la alarma durante la detección. Si Arduino detecta una presencia de voltaje de su pin analógico (#0), envía una señal ir al módulo de RX del receptor remoto. Las señales son en forma de serial, el Arduino lee esto como caracteres (datos alfanuméricos). Los personajes son 1 y 0. 1 para una presencia de movimiento y 0 para la ausencia de movimiento.













