Paso 2: Conexión de los componentes
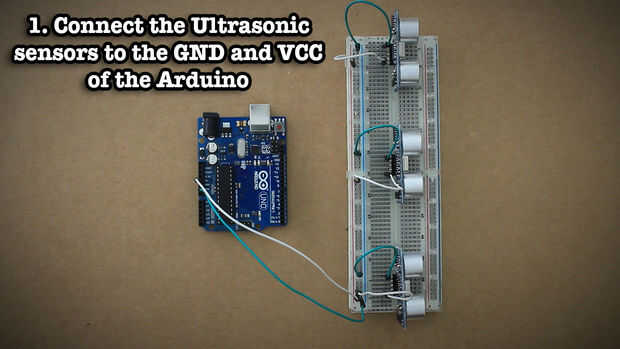
Bien, vamos a comenzar, conectar el hardware primero. Vamos a utilizar tres sensores de ultrasonidos. Podrá ser utilizados para detectar golpe izquierdo, golpe derecho y adelante y atrás el movimiento. Dependiendo del tipo de sensor de utrasonic tiene, puede tener una cantidad diferente de pines. Mina tiene 5, pero sólo usaremos cuatro. Desea conectar un puerto de tierra de la Arduino a la fila negativa en el protoboard y el puerto de 5v a la fila positiva en el protoboard.
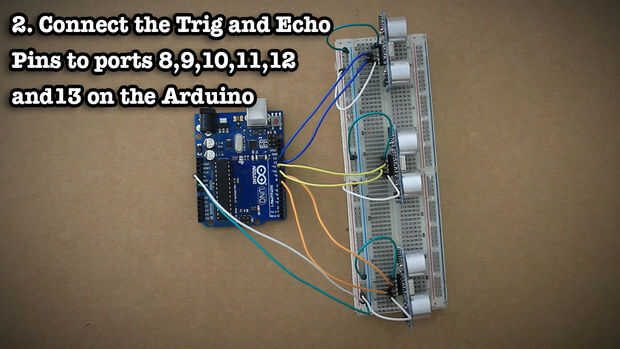
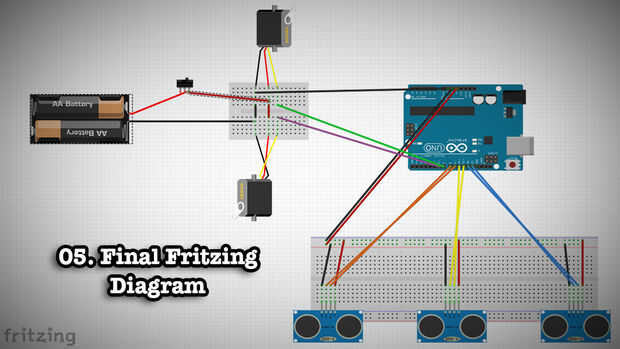
Ahora puede conectar los pines de tierra de los sensores a la fila de tierra y los pines VCC a la fila positiva. En el sensor izquierdo conectar la clavija Trig al puerto 8 y el eco al puerto 9. Para el sensor de centro, trig va a 10 y eco va a 11. Y para el sensor de la derecha, trig va a 12 y eco va a 13.
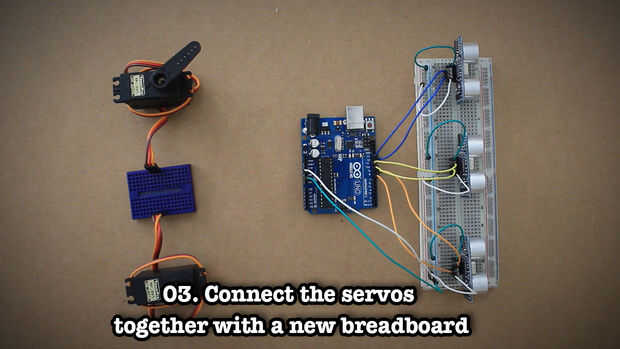
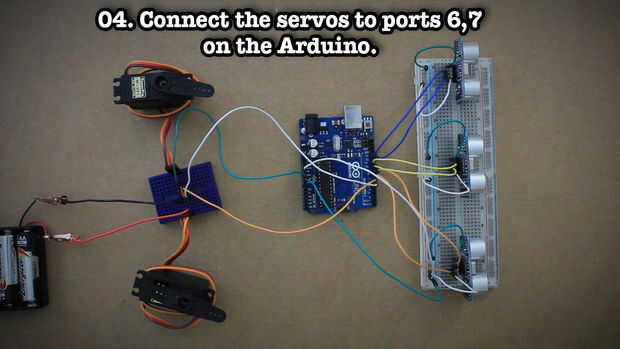
Vamos a usar un protoboard independiente, conecte los servos. Inicio conectando ambos tierra cables juntos y ambos cables juntos. Conectar una fuente de alimentación a los motores. Pero usted tiene que asegurarse de que usted también conecta la tierra a una tierra en el Arduino. Eventualmente esta fuente de alimentación se energía tanto de los motores así como Arduino. Ahora conectar un servo al puerto 6 de Arduino y el otro al puerto 7. Luego conectar el Arduino a tu ordenador y vamos a comenzar a escribir código!











")

