Paso 3: guante


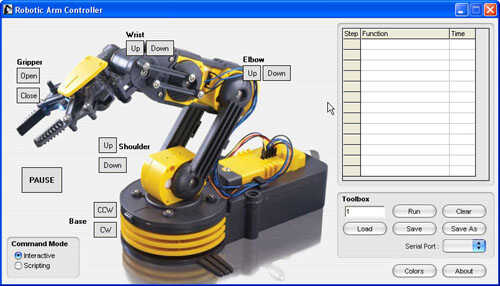
Brazo robótico OWI tiene 6 elementos al control (
)
- Un LED en el agarre del dispositivo
- Una pinza de
- Una muñeca
- Un codo - es la parte del brazo robótico unido a la muñeca
- Un hombro es la parte del brazo robótico conectado a la BASE
- A BASE
El guante está diseñado para controlar el LED de brazo robótico y todos los 5 motores (grados de libertad).
Tengo sensores individuales marcados en las fotos así como una descripción a continuación:
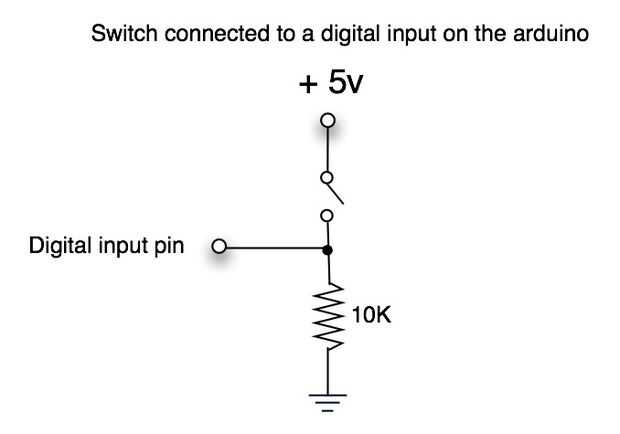
- La pinza es controlado por los botones situados en el dedo medio y meñique. Pinza se cierra presionando el dedo índice y medio juntos. Pinza se abre presionando el anillo y meñique juntos.
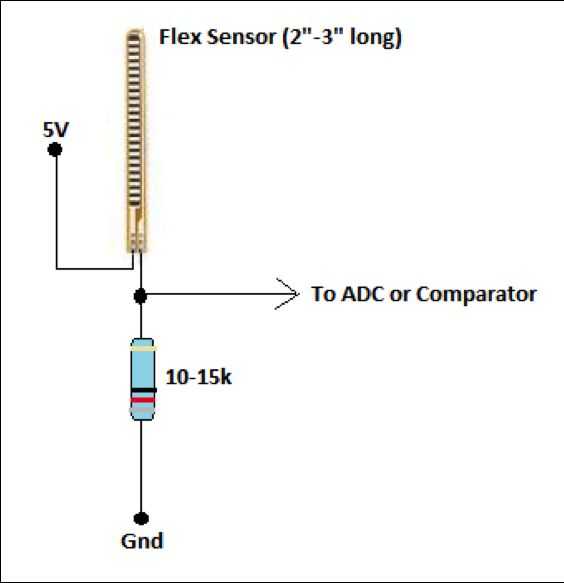
- La muñeca está controlada por la resistencia flexible en el buscador de índice. Rizar la hace de manera medio dedo bajar la muñeca, y rizar todo el camino hace que la muñeca hacia arriba. Manteniendo el dedo índice derecho detiene a la muñeca.
- El codo es controlada por acelerómetro - inclinación Palma arriba y abajo mueve el codo hacia arriba y hacia abajo respectivamente
- El hombro es controlado por el acelerómetro - Palma inclinación a la derecha y hacia la izquierda (no boca abajo aunque!) mueve el hombro hacia arriba y hacia abajo respectivamente
- La BASE es controlado por el acelerómetro, similar a la del hombro - inclinación Palma a la derecha y hacia la izquierda todo el camino a boca abajo (palma hacia arriba) mueve la base derecha y la izquierda respectivamente
- El LED de la garra es encenderse/apagarse presionando ambos botones de control de pinza juntos.
Todas las respuestas de la tecla se retrasan 1/4 de segundo para evitar el jitter.
Montaje el guante requiere algunos de soldadura y un montón de costura. Básicamente es simplemente colocar 2 botones, resistencia flexible, Accel/Gyro módulo a la tela del guante y enhebrar los cables de la caja del conector.
Dos LEDs en el cuadro de conexión son:
- Verde - encendido
- Amarillo - parpadea cuando se transmiten datos a la caja de control del brazo.


")


")







