Paso 4: Transmisor caja
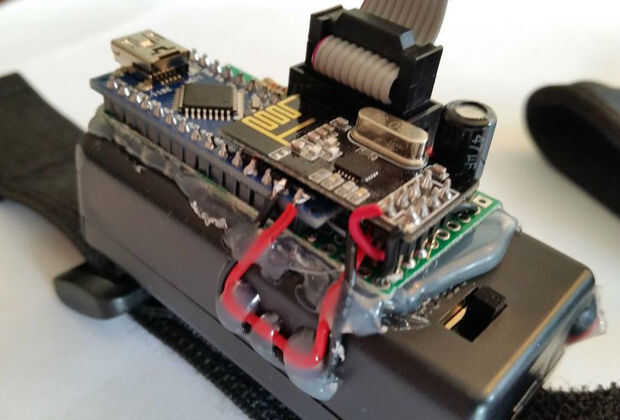
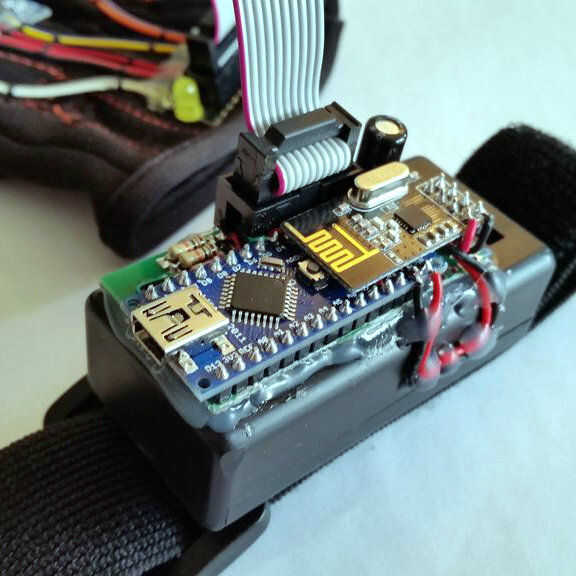
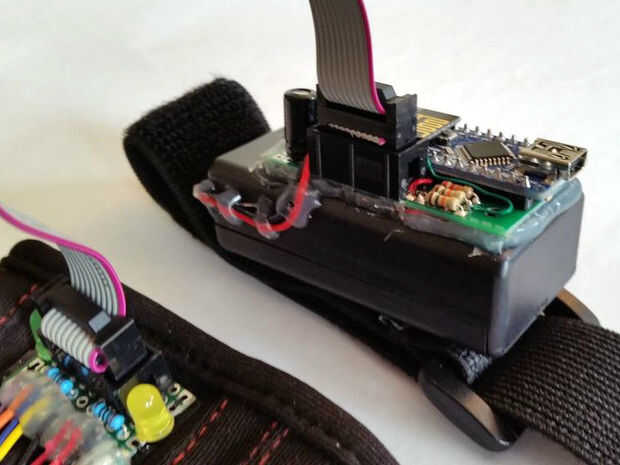
La caja del transmisor es esencialmente Arduino Nano, módulo sin hilos nRF24, conector de cable flexible y 3 resistencias: 2 resistencias de pull-down 10 kOhm para la pinza de control los botones en el guante y un resistor voltaje División 20 kOhm para el sensor flexible de control de la muñeca.
Todo soldado juntos en un tablero de vero. Tenga en cuenta que nRF24 es "colgando" Nano. Yo estaba preocupado de que esto podría provocar interferencias, pero funciona.
Usando la batería de 9v hace la correa en la parte un poco abultado, pero no quiero ensuciar con baterías LiPo. Tal vez más adelante.
Por favor vea el paso de asignación de pines para soldar las instrucciones.


")


")







