Paso 5: Caja de CONTROL de brazo

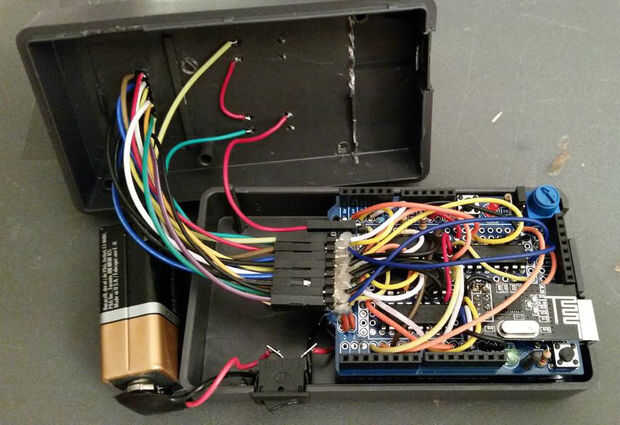
Caja de control del brazo está basada en Arduino Uno. Recibe órdenes desde el guante de forma inalámbrica a través del módulo nRF24 y controla el brazo de Robotoc de OWI via 3 chips de controlador L293D.
Desde que se utilizaron casi todos los pines Uno, hay un montón de cables dentro de la caja - apenas se cierra!
Por diseño, el cuadro se inicia en el modo OFF (como si se pulsa un botón rojodeparada ), dando tiempo de operador para calzarse el guante y prepárate. Una vez listo, prensas del operador el enlace y conexión entre la caja de guante y el control se deben establecerse inmediatamente (como lo indica el amarillo LED el guante y rojo LED de la caja de control).
CONEXIÓN A OWI
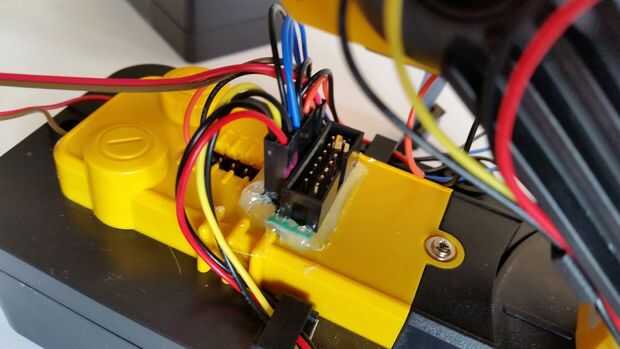
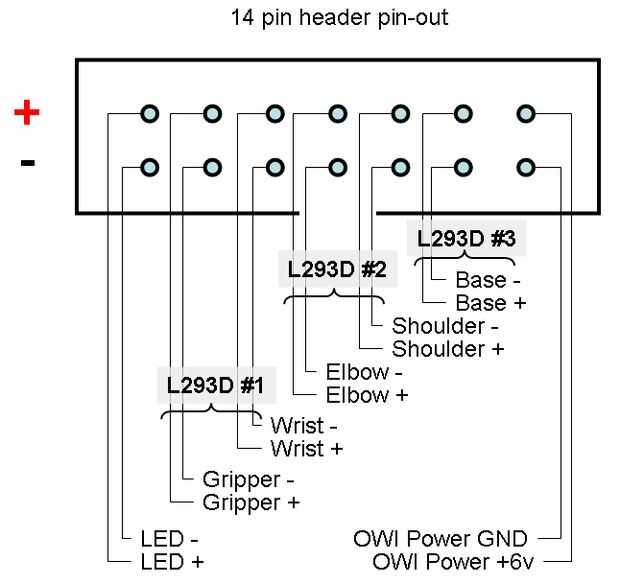
Conexión para el brazo robótico se realiza a través de 14 filas doble Jefe del pin de (según la foto de arriba) por medio de cable plano de 14 hilos.
- Conexiones LED son puntos en común (-) y pin arduino A0 a través del resistor de 220 ohmios
- Todos los cables del motor están conectados a los pines del L293D 3/6 o 11/14 (+-respectivamente). Cada L293D compatible con 2 motores, por lo tanto dos pares de pasadores.
- Poder de OWI líneas están más a la izquierda (+ 6v) y derecha pins (GND) del conector 7 pines en la parte posterior de la tapa amarilla. (Puede ver los cables enchufados en la foto de arriba). Estos dos están conectados a los pines 8 (+) y 4,5,12,13 (GND) en los tres L293Ds.
Por favor vea el resto de la asignación de pines en el siguiente paso.


")


")







