

Cómo nos sacó esta foto:
- Para mantener la iluminación constante, cubrimos todas las ventanas con papel de aluminio. Hemos tenido varios "luz de día" fluorescentes en soportes que proporciona la iluminación consistente a lo largo de las dos semanas las flores estaban floreciendo. Esa configuración de iluminación funciona muy bien para tomas de varios días debido a que los tubos fluorescentes cool.
- La cámara es controlada por un intervalómetro. Cada vez que la cámara toma una jarra, un LED rojo de luz en la parte posterior de la cámara se ilumina. Esta luz le permite saber que el obturador está abierto. (Para esta oportunidad, tomamos imágenes entre corchetes 3 cada tres minutos.)
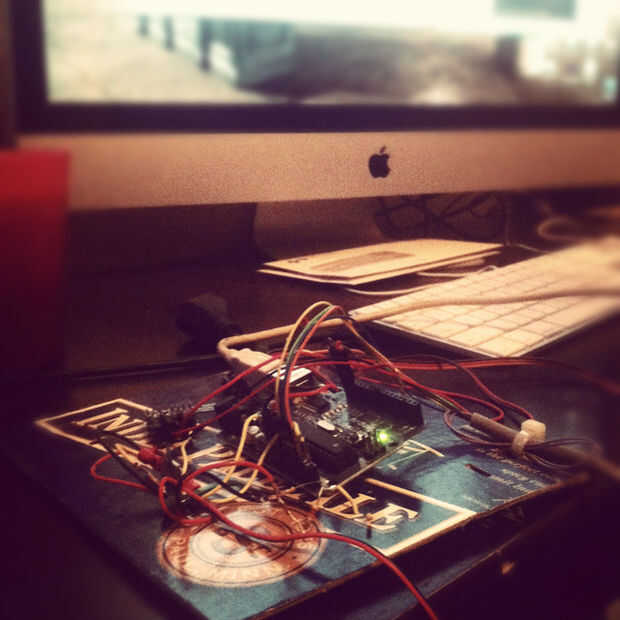
- Un Arduino Duemilanove controla toda la operación. Hemos grabado un fotoresistor (un simple sensor de luz) sobre luz de LED de la cámara. El fotoresistor reacciona a la luz emitida por el LED y crea una señal de que la placa Arduino puede medir cuando el LED se enciende. Cada vez que el obturador de la cámara se abre mientras captura una imagen, la placa Arduino lo sabe.
- Tan pronto como la placa Arduino recibe la señal que se ha tomado una foto, programamos que espere 60 segundos – esta demora fue agregado para asegurar que el carro no se moverá mientras el obturador está abierto para exposiciones largas. Después de recibir la señal de la cámara y espera, la placa Arduino activa una gran capacidad H-puente llamado un alza durante cinco segundos.
- El punto entonces alimenta un motorreductor de 2 RPM conectado al torno. El cabrestante se tira o baja el carro hacia arriba o hacia abajo de las pistas de tubo curvado, que se montan en la parte superior fully ajustable Sierra de caballos. El motor del engranaje funciona a una velocidad fija, por lo que la duración de su tiempo de ejecución determina hasta qué punto el carro se moverá entre tomas.
- El control robótico de la dolly maneja dos variables: la frecuencia de las tomas (establecidas por el intervalómetro) y la distancia recorrida por el carro entre cada disparo (establecida por la placa Arduino). Porque se fija la longitud de la pista y el tiempo de ejecución del motor de engranaje determina la distancia que el carro se mueve entre tomas, el tiempo de funcionamiento esencialmente dicta cuantas imágenes la cámara tomará mientras atraviesa la pista. Un número consistente de imágenes significa que la longitud del vídeo final dependerá sólo el runtime del cabrestante. Por lo tanto si queremos crear un lapso de tiempo de 10 segundo con disparos que cubren tres horas o diez días, sólo tenemos que ajustar el intervalómetro. Esto simplifica enormemente la programación de campo de la dolly.










")

