Paso 12: Acelerómetro IPhone Drive Control.
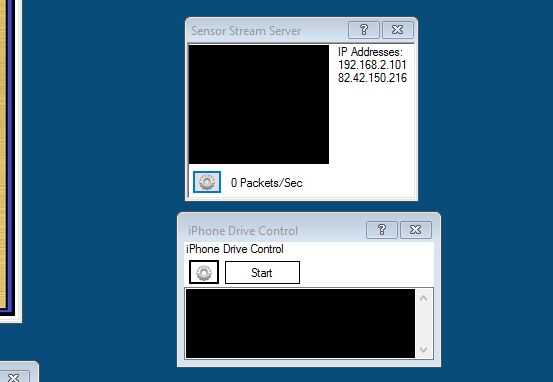
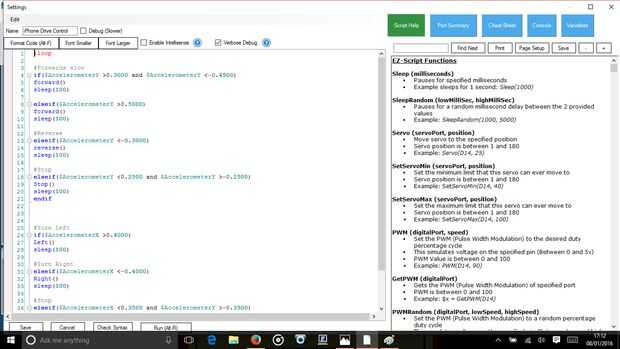
Una de las formas de accionamiento de E4-B4 puede controlar, es a través de un iPhone usando que el iPhone construido en acelerómetro. Para ello, descargar una aplicación para iOS llamada "Corriente del Sensor". Esto se comunica con un ordenador vía WiFi y envía todo el iPhone acelerómetro, giroscopio y brújulas datos. Esta información se puede extraer y utilizar para controlar motores, servos y sensores adicionales. El siguiente código de programación se utiliza para mover B4 E4 hacia delante, hacia atrás, izquierda, derecha y parada. En el software EZ-Builder, agregue el "iPhone control de Sensor de corriente, luego abrir la aplicación en tu iPhone y agregue la dirección IP en el control de corriente del sensor para el iPhone. Luego agregar un control de script vacío y agregue el siguiente script...
: lazo
#Forwards lento
Si ($AccelerometerY > 0.3000 y $AccelerometerY <-0.4500)
Forward()
Sleep(100)
#Forwards rápido
elseif($AccelerometerY >0.5000)
Forward()
Sleep(100)
#Reverse
elseif ($AccelerometerY <-0.3000)
REVERSE()
Sleep(100)
#Stop elseif ($AccelerometerY < 0.2500 y $AccelerometerY >-0.2500)
STOP()
Sleep(100)
endif
#Turn izquierda
if($AccelerometerX >0.4000)
Left()
Sleep(100)
#Turn derecho
elseif ($AccelerometerX <-0.4000)
Right()
Sleep(100)
#Stop
elseif ($AccelerometerX < 0.3500 y $AccelerometerY >-0.3500)
STOP()
Sleep(100)
endif
goto(Loop)
Ahora, cuando usted presiona "Conectar a PC" en la aplicación para iPhone y haga clic en "Inicio" en la nueva secuencia de comandos (arriba), su robot ahora conducirá en la dirección de inclinación del iPhone. Esto es sólo un ejemplo básico para ayudar a poner en funcionamiento si usted decide probar esto, pero hay mucho más que se puede hacer con esta interfaz.













