Paso 5: Electrónica, parte 1.





Este paso se centra en la electrónica en la sección del cuerpo.
Lo que se incluye es el control del robot B EZ v4, un controlador de servos SSC-32, regulador del motor de 15 amp 2 canales con puente H, cuatro interruptores de relé de luces pierna, pies de luces, bomba de agua y antorcha retráctil que irá en la cúpula. Hay también dos convertidores del Buck de lista desplegable, uno para las luces de la pierna y aumentador de presión y otro para el bajo iluminación de pie y también nueve BEC 5v los reguladores para los cuatro relés, cuatro ultrasonidos distancia sensores (ping) y para el controlador del motor.
Los cuatro Relais fueron enganchados al BEC y a cuatro puertos digitales de EZ-B. El suelo los cables de las luces y bomba de agua fue directamente a la clavija de la batería de 7v, y los cables positivo se cortaron y se alimenta a través de los relés.
Cuatro más BEC también fueron conectados a los puertos digitales de EZ-B, y éstos fueron conectados a los sensores de ping de dos pies. Los otros dos se conectarán en el paso de "Electrónica".
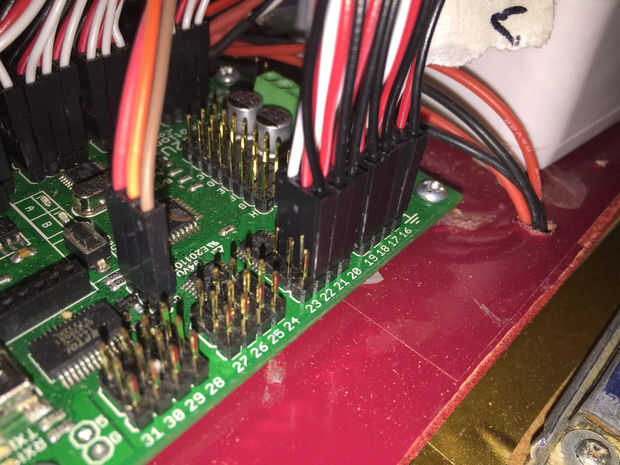
El regulador del motor fue conectado al final BEC para alimentar la lógica de controladores de motor y fue otra vez a un puerto digital de EZ-B. Hay cuatro cables del controlador de motor "motor 1", "motor de 2", "PWM 1", y "PWM 2". Éstos salieron a los cuatro pines de señal en el EZ-B que controlan ambos pies motores y dar el control de velocidad independiente. Por último, los cables de positivo y tierra para alimentar los motores fueron conectados con los otros extremos van a un enchufe de la batería de 12v. (Los tapones de la batería se hicieron de bloques de terminales enchufables). Más importante es que un cable de masa de la tierra de la batería terminal tiene que ir a un puerto de tierra en el EZ-B para crear un terreno común, o el controlador del motor no funcionará correctamente.
El controlador de servos SSC-32 fue conectado a uno de los puertos UART de las EZ-B que envía las señales a la SSC-32, junto con un positivo y tierra cables para alimentar la lógica. Una toma de corriente y tierra fueron enganchados hasta el + y - en el SSC-32 para alimentar los servos y estos Leeds fue al enchufe de la batería de 7v.
Así que todo lo fija a la plataforma electrónica retráctil y conectado, unos trabajos de fango necesitan hacer.
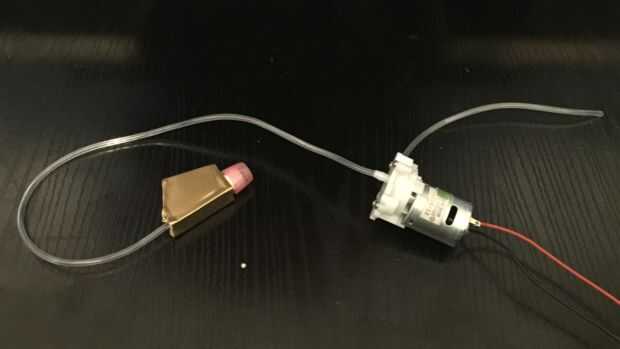
El chorro de agua fue hecho de una bomba de agua miniatura, alguna manguera de agua clara y el final de un disparador de botella agua squirter. El gatillo era cortó lejos y la manguera colocada. Esto fue a la salida de la bomba de agua, con el agua de entrada a una pequeña botella de plástico. Cuando se activa el relé de la bomba se encenderá y chorros de agua hasta que se envía un comando para apagar el relé. Más en eso más adelante.
El siguiente fue alimentar un alargador auriculares, cable HDMI y cable para la PC de la tableta. El cable de alimentación de un adaptador AC/DC, fue cortado y los extremos iban a tapones terminales así que podría ser conectado y cargado.
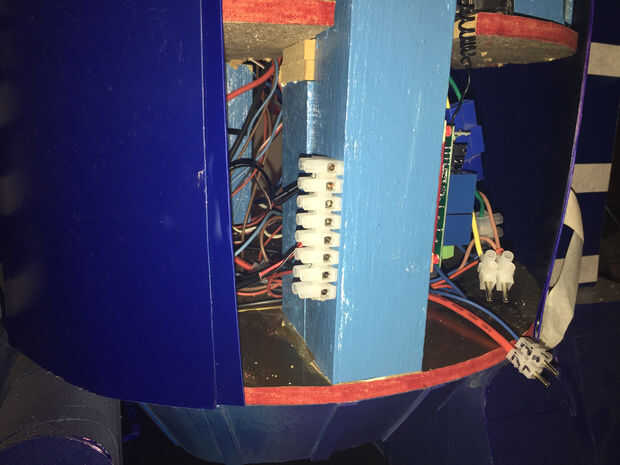
En cuanto a los tapones terminales, corté una tira de tuve 8 terminales. Dos para la batería de 7v, dos para la batería de 12v, dos para la tableta y dos para el proyector de pico (para más adelante). El otro extremo fue para los diferentes cargos (si haces esto, por favor, asegúrese de que los cables correctos para cada dispositivo/batería coincide con y la polaridad es correcta cuando ambos extremos de la terminal se conecta conoce.
La siguiente describe cómo se hicieron las herramientas de utilidad.













