Paso 6: Herramientas de utilidad.










Enlace de vídeo para dispositivos móviles:
E4-B4: Herramienta utilidad de implementación prueba
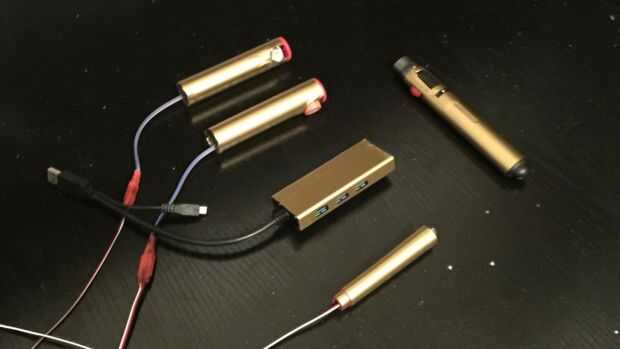
Hub USB. Aquí usé un 3 x USB memoria y hub lector de tarjetas. Todo lo que se hizo aquí fue para sacar la carcasa y pintura oro (o usted podría cubrir en la hoja adhesiva de vinilo oro). Esto fue montado y conectado a uno de los brazos retráctiles.
Multi herramienta. Lo mismo se hizo como el hub USB, pero la única diferencia era pegar un par de imanes a la herramienta, y una tira de cinta magnética pegada al brazo retráctil por lo que la herramienta podría quitarse fácilmente cuando sea necesario.
Sensor de luz 1. Aquí, un rayado a un viejo rotulador permanente, limpiado, pintado de oro y provistos de un sensor de luz dentro de uno de los extremos, los cables que salen de la otra. Esto entonces fue pegado a otro brazo retráctil.
Soplete. Esto también fue desmontado y pintado, y había un par de imanes pegados a él así que se podría quitar para rellenarlo. Cinta magnética fue unida el brazo retráctil.
Garra de cerveza. Esta hecha de una pinza humanoide disponible en la tienda de EZ-Robot. Me corte las puntas de la pinza y pegados de algunas paradas de aluminio que estuvieron doblados en forma alrededor de una lata de bebidas. Un sensor ping fue unido y leería cuando tiene cerca una mano que abriría la garra. La garra fue pintada de oro y en el brazo retráctil más grande.
Por último, el brazo manipulador fue realizada utilizando el EZ-Bits, otra garra humanoide, dos HD palanca servos y un sensor ping. Éstos fueron cabidos juntos así que podrían doblar para arriba en sí mismo cuando el brazo se retrae. Las secciones de brazo se cubrieron con un pedazo de tubo de rollo de cocina y pintadas de oro. El brazo fue entonces unido al nivel superior del cuerpo, asegurándose de que era mano mirar fijamente al ras con el marco para que la aleta de la piel frontal iba a cerrar correctamente.
Todos los sensores de ping, sensores y servos se conectaron a la SSC-32, haciendo notas escritas de lo que fue conectado con qué número puertos servo.
Momento de empezar en la cúpula.













