Paso 8: Electrónica, parte 2.











Este paso se centra en la electrónica en la sección head, pero luego pasa a conectar todo.
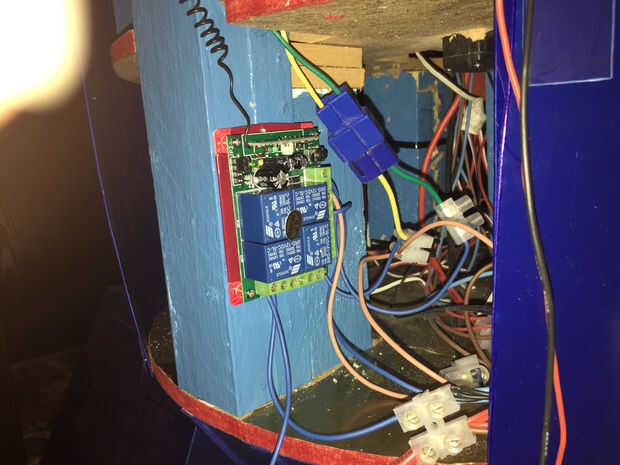
Dos convertidores del Buck de desplegable establecer y fijados a la parte de la cabeza para el foco y la luz. EL transformador se abrió y dos cables soldados a los terminales de la batería. Como antes, los cables de tierra fueron directamente a la batería, y el positivo y pasa a través de los relés "normalmente abierto" ya está en marcha en la sección del cuerpo.
A continuación, un regulador de 5v puesto en la sección head, conectado a una pantalla de LCD 2 x 16. Las clavijas de SLA y SDA en la pantalla tenían cables puente y se conectarán a los pines de SLA y SDA en uno de los puertos i2c de v4 de EZ-B.
Un pequeño soporte en "L" fue hecho de trozos de MDF, con la cámara y un segundo sensor de luz conectado.
Un mucho más pequeño soporte "L" se hizo con una pequeña tabla RGB LED fijada a él.
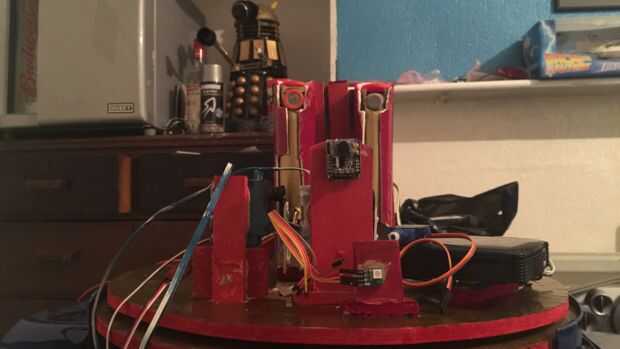
A continuación, el pico proyector se puso en marcha con la energía, HDMI y conectados los cables de audio AUX. Un pequeño contrapeso fue hecho de MDF y una bisagra, entonces el proyector se ajustó a ella. Un servo con un encargo cuerno fue unido sobre el proyector que se ajuste el ángulo de visión los proyectores. Intentó pasar por el interruptor de encendido de los proyectores y ejecutarlo a través de la retransmisión, pero no tuvo éxito en hacerlo. Así lo hizo la manera sucia y un micro servo al proyector y cuerno del servo fija el interruptor. Como dicen, es una forma "sucia" de hacerlo, pero funciona y funciona realmente bien.
Entonces todos los cables fueron alimentados a través del agujero y en la sección de cuerpo. Nota: Asegúrese de que el agujero que perforó es lo suficientemente grande para acomodar todos los cables de los periféricos sección y cúpula centrales.
Ahora era el momento para conectar todo.
Nota: Todos los convertidores Buck desplegable se deben establecer a la tensión correcta del dispositivo antes de que un dispositivo está conectado a él. Tensiones en la fábrica no pueden ser el voltaje correcto para su dispositivo que puede causar daños al dispositivo que desea conectar al convertidor buck.
Todos los relés van a digital +, - y los pernos, la señal
Ambos tableros RGB domo ir a pernos de tierra y tres pines de señal de cada placa.
La cámara se conecta al puerto de la cámara de la v4.
Las patillas SDL y SDA de la pantalla de LCD conectan a un puerto i2c, con los cables del regulador de 5v va a + y - los pernos.
Matrices RGB de 8 x dos 8 se conectarán a los otros dos puertos i2c cuando estén disponibles (una actualización publicada cuando se hace).
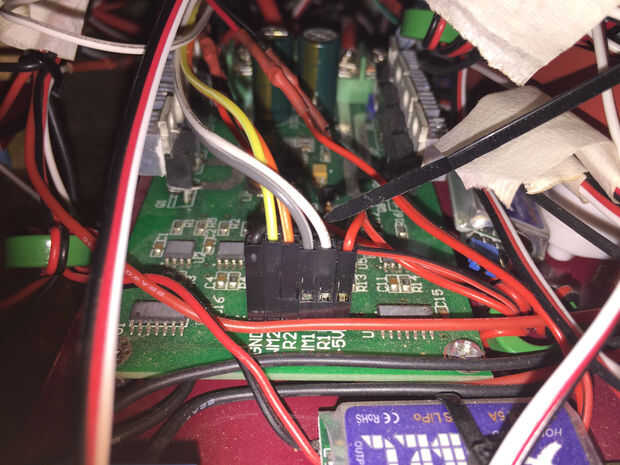
El regulador de 5v de controladores de motor fue conectado con + y - los pernos digitales, junto con los dos PWM y dos cables MOTOR conectados a los cuatro pines de señal digital.
En cuanto a conectar el SSC-32 para el EZ-B, fue conectar a través de una conexión en serie a uno de los puertos UART de EZ-B. Todos los servos, con la excepción de la cúpula izquierda/derecha y servos de jet, del agua fueron enganchadas a la SSC-32.
Los sensores cuatro ping necesitan 8 puertos digitales. Se conecta un sensor ping como sigue... + y - va a través de un regulador de 5v y se conecta a tierra y positivo pines en un puerto digital. El gatillo va al pin de una señal, y el eco va a un pin de señal adyacentes.
El sensor PAR se conecta a un puerto digital a través de un regulador de 5v.
El altavoz pasa a través de un convertidor buck y luego a la batería de 7v (el altavoz que utiliza es 4v en el convertidor buck).
Todos los sensores analógicos fueron conectados a los puertos ADC en el EZ-B.
Y el HDMI, cable, hub USB y cables de extensión de auriculares están conectados a la PC de la tableta.
Cada sistema fue probado cuando la fueron conectados para asegurarse de que todo estaba funcionando correctamente.
Por último, se conectaron los servos en la cúpula a extensión de servo ya puesto en marcha y montar la pantalla LDC su vivienda, los cables conectados EL cable y segunda junta RGB en la lupa.
Entonces la cúpula se colocó en la parte de la cabeza que debe tener un buen ajuste y no debe deslizarse cuando el servo gira la sección principal. Aunque se ha hecho a lo largo de la construcción de la sección head, asegúrese de que todo está correctamente alineado como el proyector, retracción expositor de sensores, cámara y tablero de LED RGB.
Por lo que 118 días más tarde, finalmente se realizó la construcción. Ahora a pasar a la diversión parte (no que edificio E4 no era divertido también), y que es traer una vida a este pequeño droide, por así decirlo.













