Paso 5: cableado.


CABLEADO
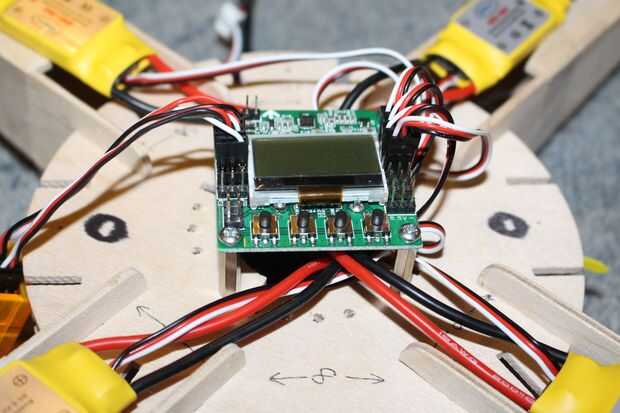
Tablero de control de vuelo.
He decidido seguir con la Junta KK2.1.5 como que me permiten cambiar la configuración rápidamente y sin necesidad de conectarse a un ordenador. Se puede utilizar otro tablero, pero usted tendrá que encontrar la manera de configurarlo.
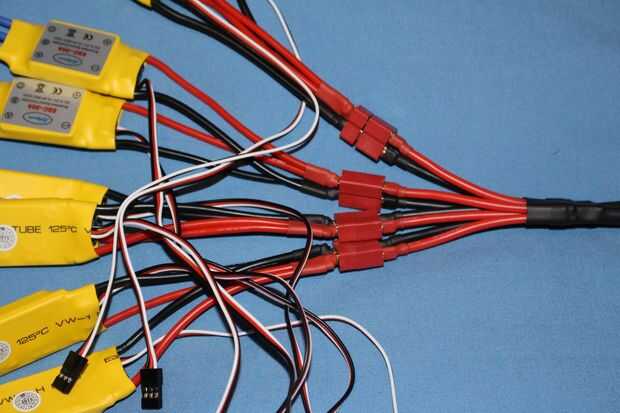
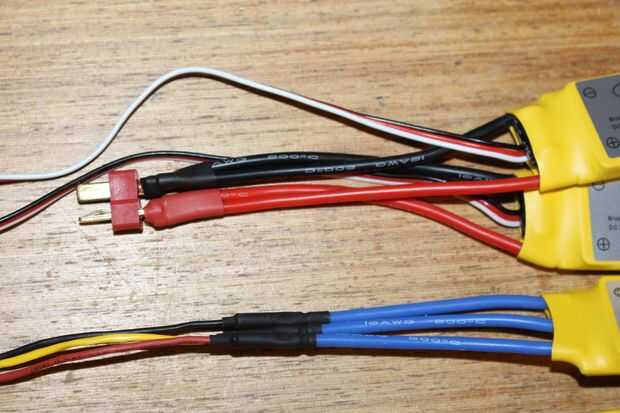
Los cables de alimentación
Decidí conectar los motores en pares con un motor en marcha hacia la derecha y el otro corriendo en sentido contrario. Esto funciona bien para la quads, hex y Oct, pero cuando usted quiere poner un motor en la parte inferior que necesita para correr en la dirección opuesta de la que en la parte superior, y porque está montado boca abajo que necesita para funcionar en la misma dirección que la parte superior. (creo que tiene sentido)













