Paso 3: Diseño y montaje: baterías

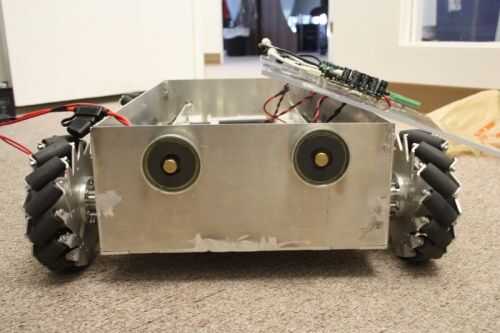

Hemos utilizado un par de 12V, 10Ah las baterías en serie para generar 24VDC. Fundió la salida de las baterías con un fusible de 20A. 20 amperios era necesario, a pesar de que cada uno de los cuatro motores es clasificado para 2,2 amperios continuos. Motores de corriente continua se consumen mucho más que su corriente nominal bajo carga pesada o puesta en marcha fácilmente. De vez en cuando volar el fusible de 10 Amp. 15 amperios sería probablemente suficientes.
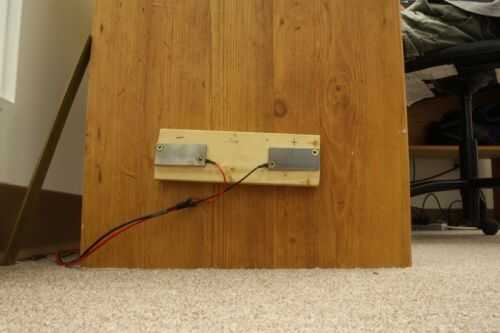
Para recargar las baterías montamos un par de contactos en la parte frontal del robot por lo que no tenemos que abrir la tapa para recargar. Estos contactos son realmente magnéticos soldadura abrazaderas de tierra - se transmite la energía a través de la babosa de centro cobre, y el imán del resorte alrededor de la babosa aplica una presión constante. Tenemos dos contactos de acero en la pared conectada al cargador de baterías. También nos podemos sujetar el cargador directamente a las babosas cobre si alguien está utilizando el robot en una oficina distinta.












")
