Paso 12: Interpretación de datos de Control remoto IR
Descargar y abrir mi código fuente. Usted necesita llenar un montón de arreglos de discos, y también configurar algunas definiciones.
Si copia sólo una larga lista en la herramienta de visualización, entonces será bastante obvio cuando una repite patrón, razón por la cual la visualización es importante.
Utilice la herramienta de visualización que he proporcionado en el paso anterior para generar una matriz para cada comando en su control remoto. Rellene "ircodes.h" con los arreglos de discos (me los he llenado con mis propios códigos, que no trabajo para usted, es necesario sustituir de manera similar). El tamaño de la matriz es el "número de en pulsos" multiplicado por 2 (ya que hay un OFF pulse para cada pulso de ON).
Es necesario determinar la cantidad de tolerancia a errores, saber esto, basta con comparar todos sus datos. Si un pulso de ON es aproximadamente 600 nanosegundos en promedio y los valores grabados y 633, 579, 624, una tolerancia de error de +/-50 es probablemente suficiente. Si los valores son 492 y 613 y tal y tal, entonces tratan de 100, esto podría tomar algún ensayo y error.
El "umbral de pulso de inicio" debe ser más corto que el largo pulso, que señala el inicio de un comando.
Y no olvide configurar el número de en pulsos dentro del código.
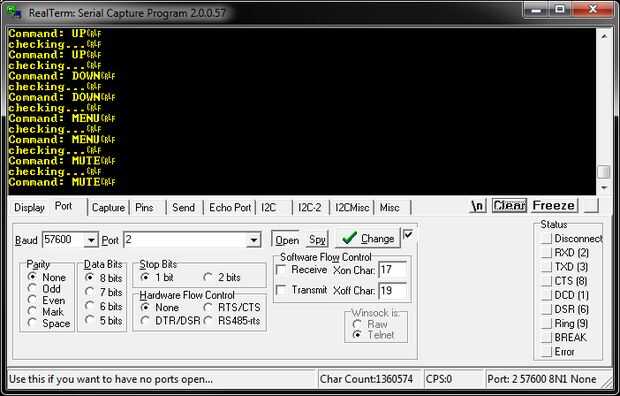
Después de que ha llenado en los arreglos de discos y configura el código fuente, compilar y ejecutarlo y ver su terminal de la serie, que debe salir el nombre del comando.
Muy bien, ahora usted puede con éxito leer comandos de botón de un mando a distancia IR.
Por cierto, me doy cuenta hay formas mejores de hacerlo que es más sólidos (por ejemplo, realmente traducir la secuencia de impulsos en código binario primero), pero el método que se describe aquí es mejor para conseguir que funcione con cualquier mando a distancia sin pensar demasiado.



")









