




-1 x ARDUINO UNO
-1 x SET de TAMIYA placa UNIVERSAL
-1 pista de x TAMIYA y sistema de rueda
-1 x caja de engranajes de MOTOR TAMIYA
-1 controlador de doble puente H Motor x L298
-1 x 9g Servo
-1 x Sensor infrarrojos Sharp
-Plexiglás
-1 interruptor de x SPDT
-Algunos cables
-Pistola de pegamento caliente
-3 x pilas de 9 v
-1 x PCB de prueba
-1 x L0875
condensador de 1uf x -1
-1 x 10uf condensador
Código de Arduino:
#include
MS del servo;
int a = 4;
int b = 5;
int c = 6;
int d = 7;
int x;
int pos = 0;
void setup()
{
Serial.Begin(9600);
pinMode(a,OUTPUT);
pinMode(b,OUTPUT);
pinMode(c,OUTPUT);
pinMode(d,OUTPUT);
MS.attach(3);
}
void loop()
{
int S;
int F;
int D;
int sensorValue = analogRead(A2);
flotador vol = sensorValue * (5.0 / 1023.0);
Serial.println(vol);
Si (vol > = 0.7)
{
MS.write(0);
pos = 0;
Delay(500);
Serial.println(POS);
MS.write(90);
pos = 90;
Delay(500);
Serial.println(POS);
MS.write(180);
pos = 180;
Delay(500);
Serial.println(POS);
MS.write(90);
pos = 90;
Delay(500);
Serial.println(POS);
Si (pos == 0 & & vol > = 0.7)
{
S = 1;
}
Si (pos == 0 & & vol < = 0.7)
{
S = 0;
}
Si (pos == 90 & & vol > = 0.7)
{
F = 1;
}
Si (pos == 90 & & vol < = 0.7)
{
F = 0;
}
Si (pos == 180 & & vol > = 0.7)
{
D = 1;
}
Si (pos == 180 & & vol < = 0.7)
{
D = 0;
}
Si (S == 0 & & F == 1 & & D == 1)
{
digitalWrite (a, alto);
digitalWrite (b, LOW);
digitalWrite (c, LOW);
digitalWrite (d, alto);
}
Si (S == 1 & & F == 0 & & D == 1)
{
digitalWrite (un, bajo);
digitalWrite (b, LOW);
digitalWrite (c, LOW);
digitalWrite (d, LOW);
}
Si (S == 1 & & F == 1 & & D == 0)
{
digitalWrite (un, bajo);
digitalWrite (b, alto);
digitalWrite (c, HIGH);
digitalWrite (d, LOW);
}
Si (S == 1 & & F == 1 & & D == 1)
{
digitalWrite (a, alto);
digitalWrite (b, LOW);
digitalWrite (c, HIGH);
digitalWrite (d, LOW);
}
Serial.println (S);
Serial.println(F);
Serial.println(D);
}
Si (vol < = 0.7)
{
MS.write(90);
digitalWrite (un, bajo);
digitalWrite (b, alto);
digitalWrite (c, LOW);
digitalWrite (d, alto);
}
}
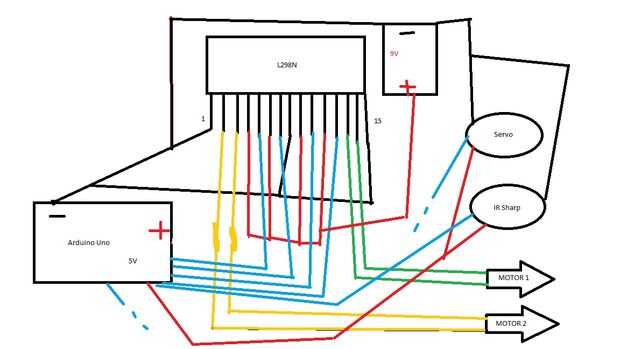
Conecttion de PIN:
L298N:
-perno 1, 8, 15 y gnd arduino al ánodo de la batería de 9v;
-pin 2, 3 para motor 1;
-pin 13, 14, motor 2.
-pin 4, 6, 9, 11 al cátodo de la batería
-pin 5, 7, 10, 12 para pin digital de arduino (digital pin 4, 5, 6, 7);
Servo:
-gnd a gnd de arduino;
-cable rojo para 5v de arduino;
-cable (señal) de blanco al pin digital 3 arduino;
Sensor infrarrojos Sharp:
-gnd a gnd de arduino;
-cable rojo para 5v de arduino;
-cable (señal) de blanco al pin analógico A2 arduino














