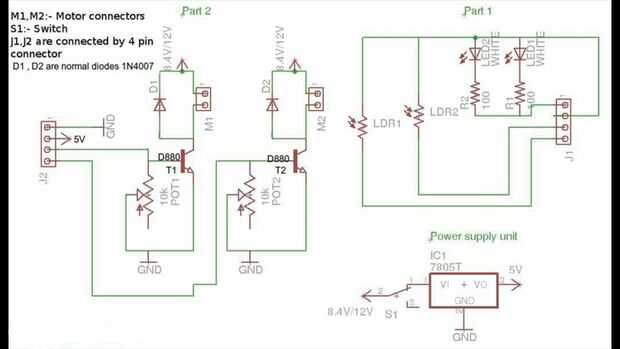
Paso 2: Diagrama del circuito



Comencé conectando las ruedas giratorias hacia el bot que se tiene que enfrentar el suelo.
A continuación, conecté los motores y las ruedas al cuerpo del chasis.
Después de eso, hice el sensor que se encuentra en la parte superior - derecha del diagrama del circuito.
Luego he hecho el cuerpo principal del bot.







")





")