Paso 5: precauciones
2. antes de fijar los motores para el chasis, hace que ambos giran en la misma dirección deseable.
3. motores están conectados al tierra-lado de lo chasis. Por lo tanto, asegúrese de traer su cable para el otro lado del chasis a través de la cavidad, para conectar al PCB.
4. hacer una línea de base común en un extremo de la placa. Conecte todos los motivos en el circuito y el negativo de la batería aquí.
5. después de completar el PCB, cortar para que quepa en la cavidad del chasis.
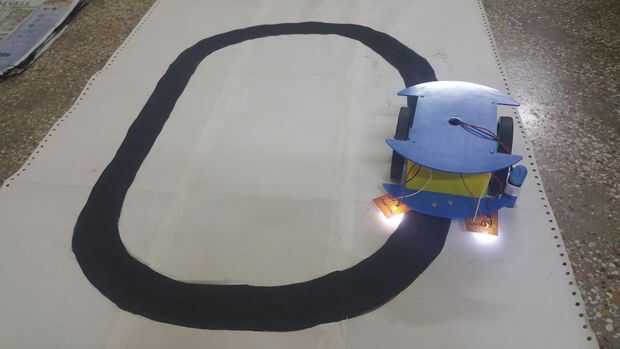
6. después de la terminación, si las ruedas no giran sincrónicamente, el bot puede moverse de una manera extraña. Para eso, ajustar la resistencia de los dos potenciómetros para que la velocidad de rotación es el misma.







")





")