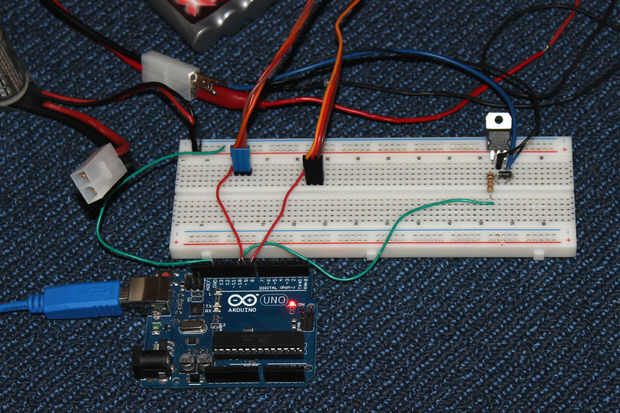
Paso 10: electrónica
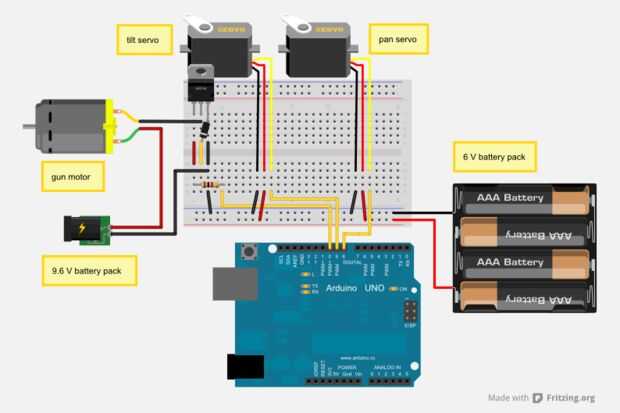
El voltaje de la batería había conectada a los controles de motor su arma la tasa de disparo. Si desea que su arma para disparar más rápido no dude de utilizar una segunda batería o con una tasa más alta de la tensión.
Muchas gracias lo Bob Rudolph para escribir el código impresionante de la Centinela (también se puede descargar aquí). Sólo subir los archivos a tu Arduino. Asegúrese de ajustar las posiciones del servo a su pistola!
Código de Arduino de PSG:
/* -------------------- Project Sentry Gun -------------------- ============================================================ ----- An Open-Source Project, initiated by Bob Rudolph ----- */ // Set your controller type here // type options: "Arduino_bare", "Shield_v4", "Shield_v6", "Shield_v7", "Standalone_v3", "Standalone_v5", "Standalone_v7", "Standalone_v8" #define type "Arduino_bare" /* Help & Reference: http://projectsentrygun.rudolphlabs.com/make-your-own Forum: http://projectsentrygun.rudolphlabs.com/forum ATTACHMENT INSTRUCTIONS: (for using an Arduino board) attach x-axis (pan) standard servo to digital I/O pin 8 attach y-axis (tilt) standard servo to digital I/O pin 9 attach trigger standard servo to digital I/O pin 10 attach USB indicator LED to digital pin 11 attach firing indicator LED to digital I/O pin 12 attach mode indicator LED to digital I/O pin 13 attach reloading switch to digital I/O pin 3 (low-active: when on, connects pin to GND) attach diable plate momentary button to digital I/O pin 2 (low-active: when on, connects pin to GND) attach electric trigger MOSFET circuit to digital I/O pin 7 adjust the values below to the values that work for your gun: */ // <=========================================================================> // Begin custom values - change these servo positions to work with your turret // <=========================================================================> // servo positions: #define panServo_scanningMin 60 // how far side to side you want the #define panServo_scanningMax 120 // gun to turn while 'scanning' #define scanningSpeed 3000 // total time for 1 sweep (in milliseconds) #define panServo_HomePosition 90 // 'centered' gun position #define tiltServo_HomePosition 90 // #define panServo_ReloadPosition 90 // convenient position for reloading gun #define tiltServo_ReloadPosition 85 // //#define triggerServo_HomePosition 120 // trigger servo not-firing position //#define triggerServo_SqueezedPosition 90 // trigger servo firing position // more trigger settings: #define triggerTravelMillis 1500 // how often should trigger be squeezed (in semi-auto firing) // higher value = slower firing, lower value = faster firing // disable plate settings: #define disablePlateDelay 5000 // how long to disable sentry when plate is pressed (in milliseconds) // ammunition magazine/clip settings: boolean useAmmoCounter = false; // if you want to use the shot counter / clip size feature, set this to true int clipSize = 100; // how many shots before the gun will be empty and the gun will be disabled (reload switch resets the ammo counter) // <=========================================================================> // End custom values // <=========================================================================> int panServoPin; // Arduino pin for pan servo int tiltServoPin; // Arduino pin for tilt servo //int triggerServoPin; // Arduino pin for trigger servo, or output to trigger MOSFET int firingIndicatorLEDPin; // Arduino pin for firing indicator LED int USBIndicatorLEDPin; // Arduino pin for USB indicator LED int modeIndicatorLEDPin; // Arduino pin for Mode indicator LED int reloadSwitchPin; // Arduino pin for input from RELOAD switch int disablePlatePin; // Arduino pin for input from disable plate int electricTriggerPin; // Arduino pin for output to trigger MOSFET boolean invertInputs; // TRUE turns on internal pull-ups, use if closed switch connects arduino pin to ground // pin assignments for each hardware setup are set in the function assignPins() at bottom of code typedef struct config_t { // Booleans but int int controlMode; int safety; int firingMode; int scanWhenIdle; int trackingMotion; int trackingColor; int leadTarget; int safeColor; int showRestrictedZones; int showDifferentPixels; int showTargetBox; int showCameraView; int mirrorCam; int soundEffects; // Integers int camWidth; int camHeight; int nbDot; int antSens; int minBlobArea; int tolerance; int effect; int trackColorTolerance; int trackColorRed; int trackColorGreen; int trackColorBlue; int safeColorMinSize; int safeColorTolerance; int safeColorRed; int safeColorGreen; int safeColorBlue; int idleTime; // Floats double propX; double propY; double xRatio; double yRatio; double xMin; double xMax; double yMin; double yMax; } configuration; configuration configuration1; #include <Servo.h> Servo pan; // x axis servo Servo tilt; // y axis servo Servo trigger; // trigger servo int xPosition; // pan position int yPosition; // tilt position int fire = 0; // if 1, fire; else, don't fire int fireTimer = 0; int fireSelector = 1; // 1 - semi-automatic firing, auto/semi-auto gun // 3 - full automatic firing, full-auto gun int idleCounter = 0; int watchdog = 0; int watchdogTimeout = 2000; boolean idle = true; boolean scanning = false; boolean scanDirection = true; boolean disabled = false; unsigned long int disableEndTime; int scanXPosition = panServo_scanningMin; int shotCounter = 0; // number of shots fires since last reload boolean clipEmpty = false; // is the ammo magazine empty? byte indicator; // if 'a', continue, if 'z', idle byte x100byte; // some bytes used during serial communication byte x010byte; byte x001byte; byte y100byte; byte y010byte; byte y001byte; byte fireByte; byte fireSelectorByte; byte scanningByte; void setup(){ assignPins(); pan.attach(panServoPin); // set up the x axis servo pan.write(panServo_HomePosition); tilt.attach(tiltServoPin); // set up the y axis servo tilt.write(tiltServo_HomePosition); pinMode(electricTriggerPin, OUTPUT); // electric trigger, set as output digitalWrite(electricTriggerPin, LOW); // trigger.attach(triggerServoPin); // servo for trigger, set that servo up // trigger.write(triggerServo_HomePosition); pinMode(USBIndicatorLEDPin, OUTPUT); // set up USB indicator LED pinMode(modeIndicatorLEDPin, OUTPUT); // set up Mode indicator LED pinMode(firingIndicatorLEDPin, OUTPUT); // set up firing indicator LED pinMode(reloadSwitchPin, INPUT); // set up reload switch input pinMode(disablePlatePin, INPUT); // set up disable plate input if(invertInputs) { digitalWrite(reloadSwitchPin, HIGH); // turn on internal pull-up digitalWrite(disablePlatePin, HIGH); // turn on internal pull-up } Serial.begin(4800); // start communication with computer } void loop() { if (Serial.available() >= 10) { // check to see if a new set of commands is available watchdog = 0; indicator = Serial.read(); // read first byte in buffer if(indicator == 'a') { // check for 'a' (indicates start of message) idle = false; idleCounter = 0; digitalWrite(USBIndicatorLEDPin, HIGH); // light up the USB indicator LED x100byte = Serial.read(); // read the message, byte by byte x010byte = Serial.read(); // x001byte = Serial.read(); // y100byte = Serial.read(); // y010byte = Serial.read(); // y001byte = Serial.read(); // fireByte = Serial.read(); // fireSelectorByte = Serial.read(); // fireSelector = int(fireSelectorByte) - 48; // convert byte to integer scanningByte = Serial.read(); if((int(scanningByte) - 48) == 1) { scanning = true; } else{ scanning = false; } } else if(indicator == 'z'){ // check for command to go idle (sent by computer when program is ended) idle = true; } else if(indicator == 'b'){ // start backup backup(); } else if(indicator == 'r'){ // start restore restore(); } } else{ watchdog++; if(watchdog > watchdogTimeout) { idle = true; } } if(idle) { // when Arduino is not getting commands from computer... Serial.write('T'); // tell the computer that Arduino is here idleCounter++; // periodically blink the USB indicator LED if(idleCounter > 1000) { // sequenceLEDs(1, 100); delay(10); // digitalWrite(USBIndicatorLEDPin, HIGH); // // delay(250); // // digitalWrite(USBIndicatorLEDPin, LOW); // idleCounter = 0; // } // else{ // digitalWrite(USBIndicatorLEDPin, LOW); // } // xPosition = panServo_HomePosition; // keep x axis servo in its home position yPosition = tiltServo_HomePosition; // keep y axis servo in its home position fire = 0; // don't fire } else{ // when Arduino is getting commands from the computer... xPosition = (100*(int(x100byte)-48)) + (10*(int(x010byte)-48)) + (int(x001byte)-48); // decode those message bytes into two 3-digit numbers yPosition = (100*(int(y100byte)-48)) + (10*(int(y010byte)-48)) + (int(y001byte)-48); // fire = int(fireByte) - 48; // convert byte to integer } if(scanning) { digitalWrite(modeIndicatorLEDPin, HIGH); if(scanDirection) { scanXPosition += 1; if(scanXPosition > panServo_scanningMax) { scanDirection = false; scanXPosition = panServo_scanningMax; } } else{ scanXPosition -= 1; if(scanXPosition < panServo_scanningMin) { scanDirection = true; scanXPosition = panServo_scanningMin; } } xPosition = scanXPosition; yPosition = tiltServo_HomePosition; fire = 0; delay(scanningSpeed/abs(panServo_scanningMax-panServo_scanningMin)); } else{ digitalWrite(modeIndicatorLEDPin, LOW); } if((digitalRead(disablePlatePin) == HIGH && !invertInputs) || (digitalRead(disablePlatePin) == LOW && invertInputs)) { // check the disable plate to see if it is pressed disabled = true; disableEndTime = millis() + disablePlateDelay; } if(millis() > disableEndTime) { disabled = false; } if((digitalRead(reloadSwitchPin) == HIGH && !invertInputs) || (digitalRead(reloadSwitchPin) == LOW && invertInputs)) { // check the reload switch to see if it is flipped shotCounter = 0; xPosition = panServo_ReloadPosition; // if it is flipped, override computer commands, yPosition = tiltServo_ReloadPosition; // and send the servos to their reload positions fire = 0; // don't fire while reloading digitalWrite(modeIndicatorLEDPin, HIGH); delay(100); digitalWrite(modeIndicatorLEDPin, LOW); delay(100); } if(disabled) { xPosition = panServo_ReloadPosition; // if it is flipped, override computer commands, yPosition = tiltServo_ReloadPosition; // and send the servos to their reload positions fire = 0; // don't fire while reloading digitalWrite(modeIndicatorLEDPin, HIGH); delay(50); digitalWrite(modeIndicatorLEDPin, LOW); delay(50); } pan.write(xPosition); // send the servos to whatever position has been commanded tilt.write(yPosition); // if(useAmmoCounter && shotCounter >= clipSize) { clipEmpty = true; } else{ clipEmpty = false; } if(fire == 1 && !clipEmpty) { // if firing... Fire(fireSelector); // fire the gun in whatever firing mode is selected } else{ // if not firing... ceaseFire(fireSelector); // stop firing the gun } } void Fire(int selector) { // function to fire the gun, based on what firing mode is selected if(selector == 1) { fireTimer++; if(fireTimer >=0 && fireTimer <= triggerTravelMillis) { digitalWrite(electricTriggerPin, HIGH); // trigger.write(triggerServo_SqueezedPosition); digitalWrite(firingIndicatorLEDPin, HIGH); } if(fireTimer > triggerTravelMillis && fireTimer < 1.5*triggerTravelMillis) { digitalWrite(electricTriggerPin, LOW); // trigger.write(triggerServo_HomePosition); digitalWrite(firingIndicatorLEDPin, LOW); } if(fireTimer >= 1.5*triggerTravelMillis) { fireTimer = 0; if(useAmmoCounter) { shotCounter++; // increment the shot counter } } } if(selector == 3) { digitalWrite(electricTriggerPin, HIGH); // trigger.write(triggerServo_SqueezedPosition); digitalWrite(firingIndicatorLEDPin, HIGH); } } void ceaseFire(int selector) { // function to stop firing the gun, based on what firing mode is selected if(selector == 1) { fireTimer = 0; digitalWrite(electricTriggerPin, LOW); // trigger.write(triggerServo_HomePosition); digitalWrite(firingIndicatorLEDPin, LOW); } if(selector == 3) { // for my gun, both firing modes cease firing by simply shutting off. digitalWrite(electricTriggerPin, LOW); // trigger.write(triggerServo_HomePosition); digitalWrite(firingIndicatorLEDPin, LOW); } } void sequenceLEDs(int repeats, int delayTime) { int startDelay; for(int i = 0; i < repeats; i++) { digitalWrite(USBIndicatorLEDPin, LOW); digitalWrite(modeIndicatorLEDPin, LOW); startDelay = millis(); while(millis()-startDelay < delayTime) { digitalWrite(firingIndicatorLEDPin, HIGH); } digitalWrite(firingIndicatorLEDPin, LOW); startDelay = millis(); while(millis()-startDelay < delayTime) { digitalWrite(USBIndicatorLEDPin, HIGH); } digitalWrite(USBIndicatorLEDPin, LOW); startDelay = millis(); while(millis()-startDelay < delayTime) { digitalWrite(modeIndicatorLEDPin, HIGH); } digitalWrite(modeIndicatorLEDPin, LOW); startDelay = millis(); while(millis()-startDelay < delayTime) { // chill } } } void assignPins() { if(type == "Arduino_bare" || type == "Arduino_Bare") { // pin attachments: panServoPin = 8; // Arduino pin for pan servo tiltServoPin = 9; // Arduino pin for tilt servo // triggerServoPin = 7; // Arduino pin for trigger servo, or output to trigger MOSFET firingIndicatorLEDPin = 12; // Arduino pin for firing indicator LED USBIndicatorLEDPin = 11; // Arduino pin for USB indicator LED modeIndicatorLEDPin = 13; // Arduino pin for Mode indicator LED reloadSwitchPin = 3; // Arduino pin for input from RELOAD switch disablePlatePin = 2; // Arduino pin for input from disable plate electricTriggerPin = 10; // Arduino pin for output to trigger MOSFET invertInputs = true; // TRUE turns on internal pull-ups, use if closed switch connects arduino pin to ground } else if(type == "Shield_v4" || type == "Shield_v6") { // pin attachments: panServoPin = 9; // Arduino pin for pan servo tiltServoPin = 8; // Arduino pin for tilt servo // triggerServoPin = 7; // Arduino pin for trigger servo, or output to trigger MOSFET electricTriggerPin = 6; // Arduino pin for output to trigger MOSFET firingIndicatorLEDPin = 11; // Arduino pin for firing indicator LED USBIndicatorLEDPin = 12; // Arduino pin for USB indicator LED modeIndicatorLEDPin = 13; // Arduino pin for Mode indicator LED reloadSwitchPin = 10; // Arduino pin for input from RELOAD switch disablePlatePin = 2; // Arduino pin for input from disable plate invertInputs = true; // TRUE turns on internal pull-ups, use if closed switch connects arduino pin to ground } else if(type == "Shield_v7") { // pin attachments: panServoPin = 8; // Arduino pin for pan servo tiltServoPin = 9; // Arduino pin for tilt servo // triggerServoPin = 10; // Arduino pin for trigger servo, or output to trigger MOSFET electricTriggerPin = 7; // Arduino pin for output to trigger MOSFET firingIndicatorLEDPin = 12; // Arduino pin for firing indicator LED USBIndicatorLEDPin = 6; // Arduino pin for USB indicator LED modeIndicatorLEDPin = 13; // Arduino pin for Mode indicator LED reloadSwitchPin = 11; // Arduino pin for input from RELOAD switch disablePlatePin = 2; // Arduino pin for input from disable plate invertInputs = true; // TRUE turns on internal pull-ups, use if closed switch connects arduino pin to ground } else if(type == "Standalone_v3") { // pin attachments: panServoPin = 8; // Arduino pin for pan servo tiltServoPin = 9; // Arduino pin for tilt servo // triggerServoPin = 10; // Arduino pin for trigger servo, or output to trigger MOSFET electricTriggerPin = 7; // Arduino pin for output to trigger MOSFET firingIndicatorLEDPin = 12; // Arduino pin for firing indicator LED USBIndicatorLEDPin = 14; // Arduino pin for USB indicator LED modeIndicatorLEDPin = 13; // Arduino pin for Mode indicator LED reloadSwitchPin = 11; // Arduino pin for input from RELOAD switch disablePlatePin = 2; // Arduino pin for input from disable plate invertInputs = true; // TRUE turns on internal pull-ups, use if closed switch connects arduino pin to ground } else if(type == "Standalone_v5") { // pin attachments: panServoPin = 8; // Arduino pin for pan servo tiltServoPin = 9; // Arduino pin for tilt servo // triggerServoPin = 10; // Arduino pin for trigger servo, or output to trigger MOSFET electricTriggerPin = 7; // Arduino pin for output to trigger MOSFET firingIndicatorLEDPin = 12; // Arduino pin for firing indicator LED USBIndicatorLEDPin = 14; // Arduino pin for USB indicator LED modeIndicatorLEDPin = 13; // Arduino pin for Mode indicator LED reloadSwitchPin = 11; // Arduino pin for input from RELOAD switch disablePlatePin = 2; // Arduino pin for input from disable plate invertInputs = true; // TRUE turns on internal pull-ups, use if closed switch connects arduino pin to ground } else if(type == "Standalone_v7") { // pin attachments: panServoPin = 8; // Arduino pin for pan servo tiltServoPin = 9; // Arduino pin for tilt servo // triggerServoPin = 10; // Arduino pin for trigger servo, or output to trigger MOSFET electricTriggerPin = 7; // Arduino pin for output to trigger MOSFET firingIndicatorLEDPin = 12; // Arduino pin for firing indicator LED USBIndicatorLEDPin = 14; // Arduino pin for USB indicator LED modeIndicatorLEDPin = 13; // Arduino pin for Mode indicator LED reloadSwitchPin = 11; // Arduino pin for input from RELOAD switch disablePlatePin = 2; // Arduino pin for input from disable plate invertInputs = true; // TRUE turns on internal pull-ups, use if closed switch connects arduino pin to ground } else if(type == "Standalone_v8") { // pin attachments: panServoPin = 8; // Arduino pin for pan servo tiltServoPin = 9; // Arduino pin for tilt servo // triggerServoPin = 10; // Arduino pin for trigger servo, or output to trigger MOSFET electricTriggerPin = 7; // Arduino pin for output to trigger MOSFET firingIndicatorLEDPin = 12; // Arduino pin for firing indicator LED USBIndicatorLEDPin = 14; // Arduino pin for USB indicator LED modeIndicatorLEDPin = 13; // Arduino pin for Mode indicator LED reloadSwitchPin = 11; // Arduino pin for input from RELOAD switch disablePlatePin = 2; // Arduino pin for input from disable plate invertInputs = true; // TRUE turns on internal pull-ups, use if closed switch connects arduino pin to ground } } Copia de seguridad:
// contributed by Hugo K. #include <EEPROM.h> #include "EEPROMAnything.h" /* // Booleans but int int controlMode; int safety; int firingMode; int scanWhenIdle; int trackingMotion; int trackingColor; int leadTarget; int safeColor; int showRestrictedZones; int showDifferentPixels; int showTargetBox; int showCameraView; int mirrorCam; int soundEffects; // Integers int camWidth; int camHeight; int nbDot; int antSens; int minBlobArea; int tolerance; int effect; int trackColorTolerance; int trackColorRed; int trackColorGreen; int trackColorBlue; int safeColorMinSize; int safeColorTolerance; int safeColorRed; int safeColorGreen; int safeColorBlue; int idleTime; // Floats double propX; double propY; double xRatio; double yRatio; double xMin; double xMax; double yMin; double yMax; */ void backup(){ char* Parameter; char* i; char BufferSerie[200]; for (int z=0;z<=200;z++) BufferSerie[z]='\0'; // Save the String Send byte bufferPos=0; char ch; boolean endOfString = false; while( !endOfString){ if(Serial.available()){ ch = Serial.read(); if(ch != '!'){ BufferSerie[bufferPos++] = ch; }else{ endOfString = true; } } } // Split the received String and update the struct configuration."Value" // Booleans Parameter = strtok_r(BufferSerie, ";", &i); configuration1.controlMode = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.safety = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.firingMode = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.scanWhenIdle = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.trackingMotion = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.trackingColor = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.leadTarget = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.safeColor = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.showRestrictedZones = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.showDifferentPixels = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.showTargetBox = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.showCameraView = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.mirrorCam = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.soundEffects = atoi(Parameter); // Integers Parameter = strtok_r(NULL, ";", &i); configuration1.camWidth = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.camHeight = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.nbDot = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.antSens = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.minBlobArea = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.tolerance = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.effect = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.trackColorTolerance = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.trackColorRed = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.trackColorGreen = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.trackColorBlue = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.safeColorMinSize = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.safeColorTolerance = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.safeColorRed = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.safeColorGreen = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.safeColorBlue = atoi(Parameter); Parameter = strtok_r(NULL, ";", &i); configuration1.idleTime = atoi(Parameter); // floats Parameter = strtok_r(NULL, ";", &i); configuration1.propX = strtod(Parameter,NULL); Parameter = strtok_r(NULL, ";", &i); configuration1.propY = strtod(Parameter,NULL); Parameter = strtok_r(NULL, ";", &i); configuration1.xRatio = strtod(Parameter,NULL); Parameter = strtok_r(NULL, ";", &i); configuration1.yRatio = strtod(Parameter,NULL); Parameter = strtok_r(NULL, ";", &i); configuration1.xMin = strtod(Parameter,NULL); Parameter = strtok_r(NULL, ";", &i); configuration1.xMax = strtod(Parameter,NULL); Parameter = strtok_r(NULL, ";", &i); configuration1.yMin = strtod(Parameter,NULL); Parameter = strtok_r(NULL, ";", &i); configuration1.yMax = strtod(Parameter,NULL); delay(20); // Backup on EEPROM 92 bytes, Start on 0 EEPROM_writeAnything(0, configuration1); //take more than 92*3.3ms } void restore(){ EEPROM_readAnything(0, configuration1); // Relode Struct configuration from EEPROM delay(20); Serial.println('R'); // Tel Processing Arduino Ready for Sending Values //Booleans Serial.print(configuration1.controlMode); Serial.print(";"); Serial.print(configuration1.safety); Serial.print(";"); Serial.print(configuration1.firingMode); Serial.print(";"); Serial.print(configuration1.scanWhenIdle); Serial.print(";"); Serial.print(configuration1.trackingMotion); Serial.print(";"); Serial.print(configuration1.trackingColor); Serial.print(";"); Serial.print(configuration1.leadTarget); Serial.print(";"); Serial.print(configuration1.safeColor); Serial.print(";"); Serial.print(configuration1.showRestrictedZones); Serial.print(";"); Serial.print(configuration1.showDifferentPixels); Serial.print(";"); Serial.print(configuration1.showTargetBox); Serial.print(";"); Serial.print(configuration1.showCameraView); Serial.print(";"); Serial.print(configuration1.mirrorCam); Serial.print(";"); Serial.print(configuration1.soundEffects); Serial.print(";"); //Integers Serial.print(configuration1.camWidth); Serial.print(";"); Serial.print(configuration1.camHeight); Serial.print(";"); Serial.print(configuration1.nbDot); Serial.print(";"); Serial.print(configuration1.antSens); Serial.print(";"); Serial.print(configuration1.minBlobArea); Serial.print(";"); Serial.print(configuration1.tolerance); Serial.print(";"); Serial.print(configuration1.effect); Serial.print(";"); Serial.print(configuration1.trackColorTolerance); Serial.print(";"); Serial.print(configuration1.trackColorRed); Serial.print(";"); Serial.print(configuration1.trackColorGreen); Serial.print(";"); Serial.print(configuration1.trackColorBlue); Serial.print(";"); Serial.print(configuration1.safeColorMinSize); Serial.print(";"); Serial.print(configuration1.safeColorTolerance); Serial.print(";"); Serial.print(configuration1.safeColorRed); Serial.print(";"); Serial.print(configuration1.safeColorGreen); Serial.print(";"); Serial.print(configuration1.safeColorBlue); Serial.print(";"); Serial.print(configuration1.idleTime); Serial.print(";"); //Floats Serial.print(configuration1.propX); Serial.print(";"); Serial.print(configuration1.propY); Serial.print(";"); Serial.print(configuration1.xRatio); Serial.print(";"); Serial.print(configuration1.yRatio); Serial.print(";"); Serial.print(configuration1.xMin); Serial.print(";"); Serial.print(configuration1.xMax); Serial.print(";"); Serial.print(configuration1.yMin); Serial.print(";"); Serial.print(configuration1.yMax); Serial.print("!"); } EEPROMAnything.h
#include <EEPROM.h> #include <Arduino.h> // for type definitions template <class T> int EEPROM_writeAnything(int ee, const T& value) { const byte* p = (const byte*)(const void*)&value; int i; for (i = 0; i < sizeof(value); i++) EEPROM.write(ee++, *p++); return i; } template <class T> int EEPROM_readAnything(int ee, T& value) { byte* p = (byte*)(void*)&value; int i; for (i = 0; i < sizeof(value); i++) *p++ = EEPROM.read(ee++); return i; }













