Paso 2: Montaje 1


Los siguientes son diferentes desde el manual.
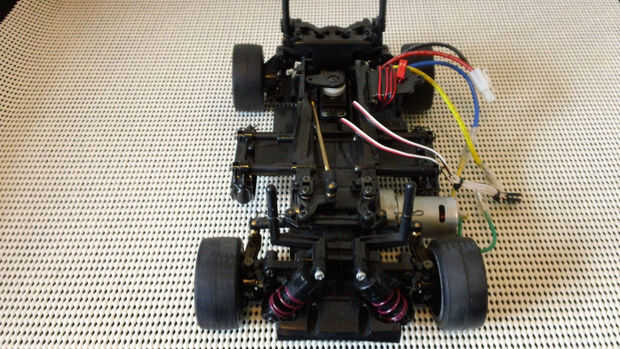
-Installacion del motorreductor
(si no quieres un coche de baja velocidad, motor de engranaje no es necesario. Montar con motor 540 de acuerdo con el manual).
Modificar piezas de A2 y B2 y conecte el motorreductor con las siguientes partes;
Diámetro en la línea de cuello 6 x 4 mm
Eje hueco de 4mm de diámetro 10 mm.
Eje de 3mm de diámetro 19 mm.
Piñón de 16T
Ajustador de 20mm de largo
Tornillo de cabeza avellanada
Omitir la parte 11 y 12 del Manual de montaje.
-Obtener el valor del centro del servo y regulador de velocidad
En lugar de la parte 19 del Manual de montaje (equipos de control de R/C), obtener el valor del centro del servo y regulador de velocidad con la conexión a Arduino. Receptor no es necesario para este sistema.
Añadir el siguiente código de Arduino para Arduino.
Código de Arduino
/*
* Servo y regulador de velocidad
* Procesamiento---SVSC_P
* Arduino Duemilanove---SVSC_A
*/
#include < Servo.h >
Servo servo;
Base del servo;
int val1;
int val2;
val3 int;
int servoneutral = 63;
int speedcontrollerneutral = 63;
steval int = servoneutral;
int velval = speedcontrollerneutral;
reversea int = 'F';
Boolean reverseb = false;
void setup() {}
Serial.Begin(115200);
servo.Attach(9);
speedcontroller.Attach(10);
}
void loop() {}
if(serial.Available() > 2) {}
val1 = Serial.read();
val2 = Serial.read();
val3 = Serial.read();
Serial.Print(65,byte);
}
Si (val1 > = 128 & & val2 < 128 & & (val3 == 'F' || val3 == 'R')) {}
steval = val1 - 128;
velval = val2;
reversea = val3;
} else if (val1 < 128 & & (val2 == 'F' || val2 == 'R') & & val3 > = 128) {}
steval = val3 - 128;
velval = val1;
reversea = val2;
} else if ((val1 == 'F' || val1 == 'R') & & val2 > = 128 & & val3 < 128) {}
steval = val2 - 128;
velval = val3;
reversea = val1;
}
servo.Write(steval);
Si (reversea == 'R' & & reverseb == false) {}
para (int i = 1; i < = 5; i ++) {}
speedcontroller.Write(speedcontrollerneutral);
Delay(15);
}
reverseb = true;
speedcontroller.Write(velval);
} else {} if(reversea=='F')
reverseb = false;
speedcontroller.Write(velval);
} else {}
speedcontroller.Write(velval);
}
}
Conecte el regulador de velocidad y servo a Arduino.
(Servo--> D9, 5V, GND regulador--> D10, 5V, GND)
Ejecute el siguiente código de procesamiento.
Código de procesamiento
/*
* Servo y regulador de velocidad
* Procesamiento---SVSC_P
* Arduino Duemilanove---SVSC_A
*/
Import processing.serial.*;
Port01 serial;
int x;
int y;
steval int = 63;
int velval = 63;
reversea int = 'F';
void setup() {}
Size(127,127);
Stroke(128);
port01 = nuevo Serial(this,"COM18",115200); COM no. varía por cada PC.
port01.Clear();
}
void draw() {}
Background(51);
línea (x, 0 x, altura);
línea (0, y de altura, anchura, y altura);
}
void serialEvent(Serial p) {}
steval = 127 - x;
velval = y;
Si (velval > = 63) {reversea = 'F';} else {reversea = 'R';}
if(p.Available() > 0) {}
port01.Write(steval+128);
port01.Write(velval);
port01.Write(reversea);
Print(steval);print(",");print(velval);print(",");println(Char(reversea));
}
}
{} void keyPressed()
{if(Key=='s')}
x = 63;
y = 63;
steval = 127 - x;
velval = y;
port01.Write(steval+128);
port01.Write(velval);
port01.Write(reversea);
}
otra cosa if(keyCode == RIGHT) {}
x += 1;
if(x > 127) {x = 127;}
}
otra cosa if(keyCode == LEFT) {}
-x = 1;
if(x < 0) {x = 0;}
}
otra cosa if(keyCode == UP) {}
y += 1;
if(y > 127) {y = 127;}
}
otra cosa if(keyCode == DOWN) {}
-y = 1;
if(y < 0) {y = 0;}
}
}
Una vez que aparezca la ventana de visualización, de prensa ' botón para iniciar la comunicación serial.
'Derecho' y 'izquierda' flecha claves se relacionan con servo (manejo) y '' y 'abajo' se relacionan con regulador de velocidad (hacia delante, hacia atrás y velocidad).
Hacer la primera figura 64 en la pantalla negra inferior proceso pulsando de ' clave.
Coloque un brazo de servo al central. Después de colocar el brazo del servo, obtener el valor del centro del servo. (Prensa ' derecha ' o 'izquierda' flechas, hacen el centro del brazo de servo, a continuación, lea la primera figura.)
Configurar controlador de velocidad según el manual de configuración del controlador de velocidad.
(De prensa ' clave, luego el segundo valor se convierte en 63 como neutral. Presione flecha arriba continuamente, luego el segundo valor se convierte en 127 como máximo hacia adelante. Presione flecha abajo continuamente, luego el segundo valor se convierte en 0 como máximo hacia atrás.)
Desconecte el servo y el controlador de velocidad de Arduino.
-Eje del Servo ya (parte 20 de instrucciones de montaje)
Cajas para baterías y reguladores para el servidor de dispositivos USB y rooter inalámbrico de banda ancha se montará sobre el servo. Conector de bola (BA23) se une al lado opuesto del brazo del servo y el eje del servo se convierte más de largo. La longitud del eje original es 89mm e hice 93mm uno.
-El receptor no es necesario para este sistema. (Parte 21 de Manual de montaje)
-Skip parte 23, 24 y 25 del manual de montaje.
-Tamaño (parte 26 de montaje Manual) del neumático
En lugar de neumáticos de diámetro 60 mm, utilizar llantas de 55 mm de diámetro.
-Pipa antena no es necesaria. (Parte 30 del Manual de montaje)
-Cuerpo
Hacer agujeros y fije el montaje Lubic.
")









")


