Paso 2: montaje


(Manual de montaje exacto no está disponible en sitio web, pero existe otro chasis CR-01 uno. http://www.tamiya.com/japan/download/rcmanual/58405.pdf)
-Obtener el valor de centro de servos y regulador de velocidad
En lugar de la parte 12 del Manual de montaje (equipos de control de R/C), obtener el valor de centro de servos y regulador de velocidad con la conexión a Arduino.
Subir el adjunto código de Arduino. Total 3 controladores (2 servos y variador 1) se utilizan en este sistema. En lugar de < Servo.h >, < SoftwareServo.h > se aplica para el código de Arduino.
Código de Arduino
SWSVSC_A.PDE
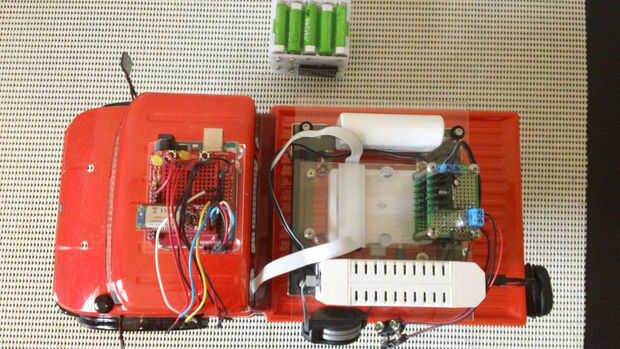
Conecte los servos y variador a Arduino.
(Servo1 frente--> D9, 5V, GND Servo2 trasero--> D10, 5V, GND regulador--> D11, 5V, GND)
Ejecutar el adjunto código de procesamiento.
Código de procesamiento
SWSVSC_P.PDE
Una vez que aparezca la ventana de visualización, de prensa ' botón para iniciar la comunicación serial.
'Derecho' y la 'izquierda' flecha claves se refieren a servos y 'up' y 'abajo' se relacionan con regulador de velocidad.
Hacer la primera figura 64 en la pantalla negra inferior proceso pulsando de ' clave.
Coloque un brazo de servo en Servo1(front) tanto como central. Después de instalar el brazo de servo en Servo1, obtener el valor de centro de servo1.
(Prensa ' derecha ' o 'izquierda' flechas, hacen el centro del brazo de servo, a continuación, lea la primera figura.)
Servo2(rear) siguiente, pulse ' tecla y luego la tecla 'b', luego del mismo modo que Servo1.
Configurar variador según manual de instalación de controlador de velocidad.
(De prensa ' clave, luego el segundo valor se convierte en 63 como neutral. Tecla 'f' luego presione flecha arriba continuamente, luego el segundo valor se convierte en 127 como máximo hacia adelante. Tecla 'r' luego presione flecha abajo continuamente, luego el segundo valor se convierte en 0 como máximo hacia atrás.)
Desconectar servos y variador de Arduino.
-No se requiere para este sistema Receiver(Part 27) y tubo de la antena (parte 32)
-Cuerpo
Hacer los agujeros para montaje Lubic y accesorio de Webcam.
Fije el montaje Lubic.
Conecte la Webcam junto con Arduino + ProtoShield + Bluetooth módem.
-Conecte 12V 1A y 5V 1A fuentes de alimentación en placa de acrílico.
-Conecte el router inalámbrico de banda ancha, servidores de dispositivos USB y eneloop batería a la placa de acrílico con cinta adhesiva de doble cara y fijar en Monte Lubic.
-Cableado/conexión y montaje 2 batería casos (AAx10pcs x 2).



 con Arduino")







")

