Paso 4: Control del Motor:
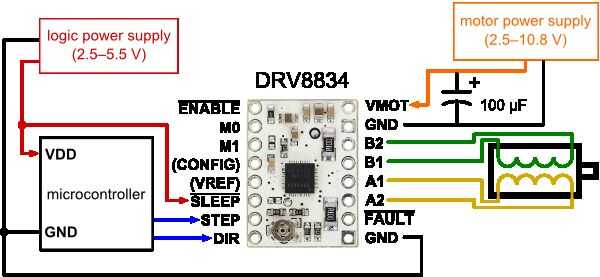
Configuración mínima de la DRV8834 se muestra en la imagen. (A1 - /A2 ROJO - GRN /B1 - YEL / B2-BLU)
https://www.Pololu.com/Product/2134
En este paso me encontré con el centro de gravedad de la cara según la imagen binaria obtuvo previamente y controlados los motores para responder al cambio en el centro de gravedad. Para ello he seguido un método que se mencionan a continuación:
Obtener imágenes tamaño 640 x 480 de la cámara. En primer lugar creé la primera sombra contrahecha que limitará la imagen 225-225 píxeles verticalmente y 305-335 píxeles horizontalmente. Si el punto centro que calculado está dentro del rango de esta área el derecho y los motores de izquierda paso comienzan a girar hacia la misma dirección con el PWM bajo puse. La segunda sombra determiné es 255-285 limitada verticalmente y 305-335 horizontalmente. Si el punto centro que calculado está dentro del rango de esta área del derecho y los motores de paso izquierdo continúan girando hacia la misma dirección con un PWM mayor. He creado cuatro áreas usando este método. (Determina los rangos de estas áreas experimentalmente). Si la persona delante de la cámara se dobla hacia adelante aumentará el PWM de los motores. Si el punto que i calculada se encuentra fuera del límite en el lado derecho, los motores paso a paso en el lado derecho comienzan a girar hacia la dirección opuesta. Si el punto está situado en el lado izquierdo fuera del límite, los motores de izquierda paso comienzan a girar hacia la dirección opuesta.
(Esta parte está aún bajo desarrollo)













