Paso 4: Programación ATmega328P microcontrolador con Arduino Uno
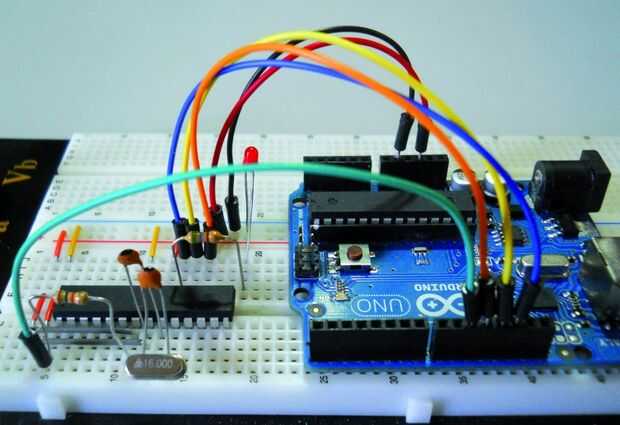
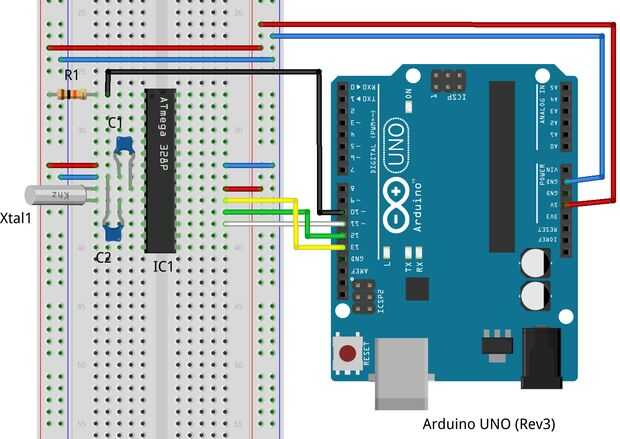
Se adjuntó el programa completo de Arduino. Puede que deba calibrar el sensor de la MPU para obtener un resultado exacto. Usted puede también requerido para ajustar los valores de umbral usados en el programa. Asegúrese de que está instalada la biblioteca de alambre de Arduino.
// MPU-6050 Short Example Sketch// Public Domain#includeconst int MPU_addr=0x68; // I2C address of the MPU-6050int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;float ax=0, ay=0, az=0, gx=0, gy=0, gz=0; //int data[STORE_SIZE][5]; //array for saving past data//byte currentIndex=0; //stores current data array index (0-255)boolean fall = false; //stores if a fall has occurredboolean trigger1=false; //stores if first trigger (lower threshold) has occurredboolean trigger2=false; //stores if second trigger (upper threshold) has occurredboolean trigger3=false; //stores if third trigger (orientation change) has occurred byte trigger1count=0; //stores the counts past since trigger 1 was set truebyte trigger2count=0; //stores the counts past since trigger 2 was set truebyte trigger3count=0; //stores the counts past since trigger 3 was set trueint angleChange=0; void setup(){ Wire.begin(); Wire.beginTransmission(MPU_addr); Wire.write(0x6B); // PWR_MGMT_1 register Wire.write(0); // set to zero (wakes up the MPU-6050) Wire.endTransmission(true); Serial.begin(9600); pinMode(11, OUTPUT); digitalWrite(11, HIGH);}void loop(){ mpu_read(); //2050, 77, 1947 are values for calibration of accelerometer // values may be different for you ax = (AcX-2050)/16384.00; ay = (AcY-77)/16384.00; az = (AcZ-1947)/16384.00; //270, 351, 136 for gyroscope gx = (GyX+270)/131.07; gy = (GyY-351)/131.07; gz = (GyZ+136)/131.07; // calculating Amplitute vactor for 3 axis float Raw_AM = pow(pow(ax,2)+pow(ay,2)+pow(az,2),0.5); int AM = Raw_AM * 10; // as values are within 0 to 1, I multiplied // it by for using if else conditions Serial.println(AM); //Serial.println(PM); //delay(500); if (trigger3==true){ trigger3count++; //Serial.println(trigger3count); if (trigger3count>=10){ angleChange = pow(pow(gx,2)+pow(gy,2)+pow(gz,2),0.5); //delay(10); Serial.println(angleChange); if ((angleChange>=0) && (angleChange<=10)){ //if orientation changes remains between 0-10 degrees fall=true; trigger3=false; trigger3count=0; Serial.println(angleChange); } else{ //user regained normal orientation trigger3=false; trigger3count=0; Serial.println("TRIGGER 3 DEACTIVATED"); } } } if (fall==true){ //in event of a fall detection Serial.println("FALL DETECTED"); digitalWrite(11, LOW); delay(20); digitalWrite(11, HIGH); fall=false; // exit(1); } if (trigger2count>=6){ //allow 0.5s for orientation change trigger2=false; trigger2count=0; Serial.println("TRIGGER 2 DECACTIVATED"); } if (trigger1count>=6){ //allow 0.5s for AM to break upper threshold trigger1=false; trigger1count=0; Serial.println("TRIGGER 1 DECACTIVATED"); } if (trigger2==true){ trigger2count++; //angleChange=acos(((double)x*(double)bx+(double)y*(double)by+(double)z*(double)bz)/(double)AM/(double)BM); angleChange = pow(pow(gx,2)+pow(gy,2)+pow(gz,2),0.5); Serial.println(angleChange); if (angleChange>=30 && angleChange<=400){ //if orientation changes by between 80-100 degrees trigger3=true; trigger2=false; trigger2count=0; Serial.println(angleChange); Serial.println("TRIGGER 3 ACTIVATED"); } } if (trigger1==true){ trigger1count++; if (AM>=12){ //if AM breaks upper threshold (3g) trigger2=true; Serial.println("TRIGGER 2 ACTIVATED"); trigger1=false; trigger1count=0; } } if (AM<=2 && trigger2==false){ //if AM breaks lower threshold (0.4g) trigger1=true; Serial.println("TRIGGER 1 ACTIVATED"); }//It appears that delay is needed in order not to clog the port delay(100);} void mpu_read(){ Wire.beginTransmission(MPU_addr); Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H) Wire.endTransmission(false); Wire.requestFrom(MPU_addr,14,true); // request a total of 14 registers AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L) AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L) AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L) Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L) GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L) GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L) GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L) }






")



")


