Paso 1: Reunir los materiales y Resumen General

Para este proyecto, he utilizado para los siguientes componentes de hardware y software
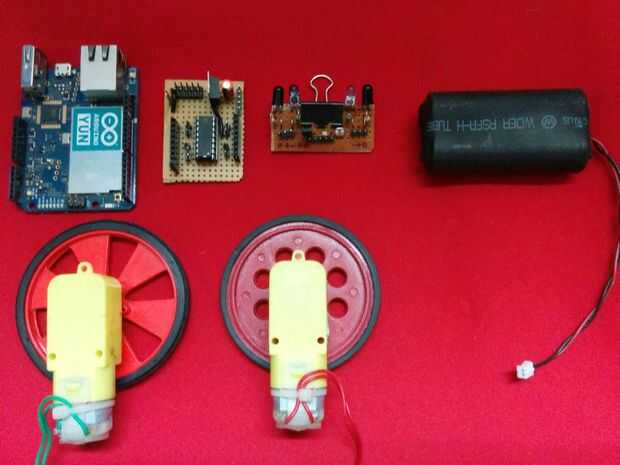
- Hardware
- Arduino Yun
- Circuito de controlador de Motor L293d
- LM7805 Regulador de voltaje
- 2 motores de BO
- Rueda del echador
- Una batería de DC de 8V
- 2 transmisores infrarrojos
- 2 receptores de infrarrojos
- Fotoresistor
- LM35 Sensor de temperatura
- Resistencias - 10K, 15K, 330E
- Condensador - 10uF
- Set de LEGO Mindtorms - varios
- Software
- Dweet.IO - servicio Web
- IDE de Arduino - v1.6.4 o superior
- MIT App Inventor - v 2.1 o superior
Este proyecto se divide en las siguientes partes:
- Chasis robot
- Interfaces de electrónicas
- Configurar un dispositivo Dweet
- Codificación del Arduino Yun
- Desarrollo de la aplicación para Android
Con el ligero servicio M2M en la nube, Dweet.io, este robot recibe órdenes del servicio y se mueve en consecuencia. También está equipado con dos sensores de obstáculo de infrarrojos que le permiten ver los obstáculos que usted no puede, porque bueno, no estás allí. Puede maniobrar alrededor de esos obstáculos para que no desplome. También hay un Sensor de temperatura a bordo que puede utilizarse para detectar la temperatura ambiente, así como una resistencia fotosensible que se utiliza para detectar la intensidad de luz ambiente para que si es claro u oscuro. Ahora te estarás preguntando cómo se controla el robot. El usuario puede enviar los comandos del robot mediante una aplicación para Android diseñada especialmente para este robot. Permite al usuario mover el robot en las cuatro direcciones, así como analizar el entorno para registrar los parámetros del sensor.




 ESP8266")




![Control de Arduino con Blynk [USB] [principiantes] inalámbrico en cualquier lugar del mundo](https://foto.askix.com/thumb/170x110/c/ea/cea51ede5b9af4af953c5d2d9b78cd05.jpg "Control de Arduino con Blynk [USB] [principiantes] inalámbrico en cualquier lugar del mundo")



