Paso 3: Diseñar las Interfaces electrónicas
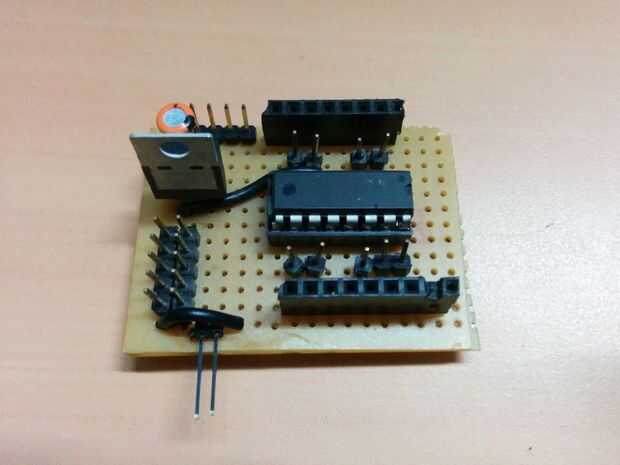
Como se dijo antes, el robot tiene bastantes sensores a bordo. Sin embargo, aparte de eso, también tiene un regulador de voltaje para proporcionar una fuente lisa de 5 voltios a la Yun.
También tiene un circuito driver L293 Motor para permitir la suficiente corriente para alimentar los motores vía el Yun de GPIO. Es esencialmente un impulso para las salidas GPIO.
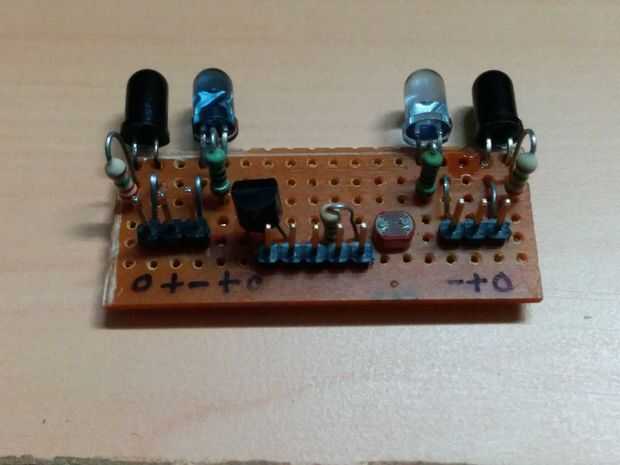
Todos los sensores antes mencionados están montados en un único PCB, por lo que hay una cantidad mínima del engorroso cableado. He hecho todos los circuitos usando una tabla de prototipos impresos moda vieja buena, así que no pueden ser los limpios en el mundo, pero los fanáticos de la limpieza pueden optar por un tablero diseñado así.
El LM35 es un sensor de temperatura analógico, que está interconectado a la ADC de 10 bits de Yun. Proporciona una lectura de la temperatura ambiente, aunque un par de bits de la parte inferior cortar resultaría en una salida mucho más estable.
El fotorresistor detecta luz ambiente alrededor de él dando un cambio en la resistencia. Este cambio en la resistencia se convierte en un cambio en el voltaje usando un circuito divisor de tensión simple. La salida de este sensor se alimenta también de canal ADC.
El par transmisor - receptor IR trabaja como obstáculo detección y mitigación de los sistemas usando un principio similar a un RADAR, pero reemplazando el sonido con luz IR. Esto es un sensor muy útil para tener a bordo. La salida de tensión de los cambios del receptor con la proximidad de un obstáculo. Este cambio es detectado por la ADC y medidas.




 ESP8266")




![Control de Arduino con Blynk [USB] [principiantes] inalámbrico en cualquier lugar del mundo](https://foto.askix.com/thumb/170x110/c/ea/cea51ede5b9af4af953c5d2d9b78cd05.jpg "Control de Arduino con Blynk [USB] [principiantes] inalámbrico en cualquier lugar del mundo")



