Paso 1: Diseñar el Nyx nuevo




Flujo de diseño
Una vez que el concepto fue colocado en el diseño comenzó en la plataforma base en paralelo con los conceptos iniciales del levantador y hacha. Como el diseño inicial se acercó a completar el módulo de trituradora ha sido añadido a la lista de armas y fue agregado al proceso de desarrollo. Una vez que la plataforma y los tres módulos generalmente fueron establecidos una gran cantidad de tiempo pasó rellenar hardware y realizar ajustes más finos a los sistemas para asegurar que estén dentro del límite de peso de 30lb.
El objetivo inicial era una plataforma de unidad que pesa 18 libras y un presupuesto de 12 libras por módulo de arma. Por la terminación del diseño de que la plataforma de coche aproximadamente pesaba 17 libras y el módulo más pesado pesadas aproximadamente 12,5 libras con dio un margen razonable para cables o errores de cálculo.
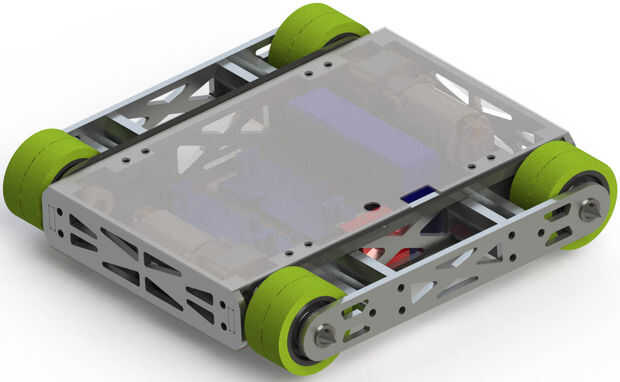
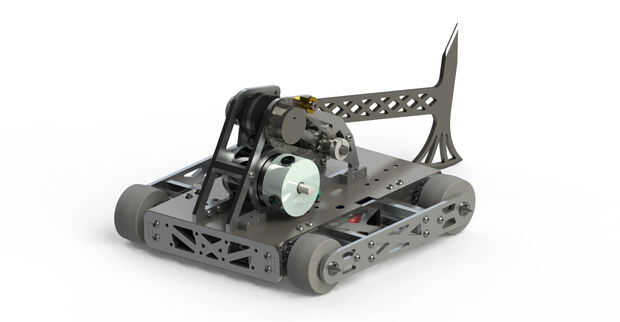
Diseño de la plataforma
Los objetivos principales de la plataforma del coche eran mantener la velocidad y la agilidad de Nyx original, proporcionar una plataforma compacta y ligera para las armas para montar a y conocer al menos el mismo nivel de durabilidad de Nyx original.
El diseño de la base fuertemente Nutstrip, ranura y pestaña diseño elementos para crear un rígido y fácil de montar el cuerpo. Los lados internos de la ranura en la parte delantera y trasera y son bloqueados con Nutstrip en cada esquina. La armadura superior e inferior están diseñadas para atornillar directamente en más nutstrip a lo largo de los rieles del chasis. El diseño utiliza guardabarros que fuertemente se asemejan a los de Nyx original. Estos guardabarros tanto protegen las ruedas y proporcionan un soporte motor fuera de borda para los ejes reducir las posibilidades de los ejes doblados causando problemas en coche durante un evento.
Los Kits de Powerdrive Dewalt trajeron directamente sobre de Nyx original, sin embargo para este diseño que se colocan en oposición a las esquinas del chasis y directamente conducir una rueda con la otra rueda del mismo lado impulsado por cadena de rodillos. En comparación a Nyx original esta instalación proporcionará una velocidad superior más alta, menor peso y menor complejidad.
El plan inicial de la rueda fue usar un par de ruedas de BaneBots 2-7/8 "x 0,8" en cada esquina, sin embargo durante el proceso de construir estas ruedas se convirtió en difíciles de encontrar en el durómetro correcta y fueron reemplazados con 3" Colson ruedas y ejes de encargo.
No hay modificaciones a la batería, como había demostrado para ser una buena solución para alimentar Nyx para un partido largo.
En el transcurso de Nyx original lo compitiendo cambiado de Holmes pasatiempos BR XL CES a la ESC de Ragebridge de e0designs.com. La nueva construcción integra dos CES Ragebridge, uno para el sistema de transmisión y otro para permitir la integración de arma rápida con limitador que permite al sistema eléctrico de ajustarse rápida y fácilmente para adaptarse a la arma de corriente ajustable.
Nyx nuevo fue diseñado para ser fabricado utilizando tres hojas de material, 1/16" espesor 6al4v titanio para la tapa y armadura inferior, 1/4" 7075 aluminio para la estructura principal de los módulos de la base y el arma y 1/4" resistentes AR400 acero para las armas. Limitar el diseño a estas tres piezas significa que hubo menos tiempo de carga del material y establecer el corte por chorro de agua durante la fabricación. También demostró para ser una buena manera de minimizar los desechos, como los componentes individuales podrían ser presentados en una manera de reducir al mínimo el espacio desaprovechado en las placas de que los componentes fueron cortados.
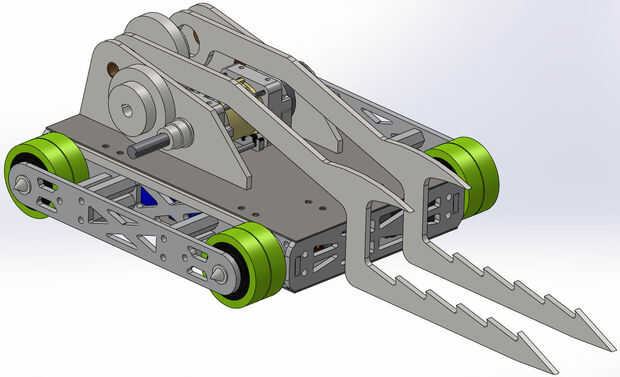
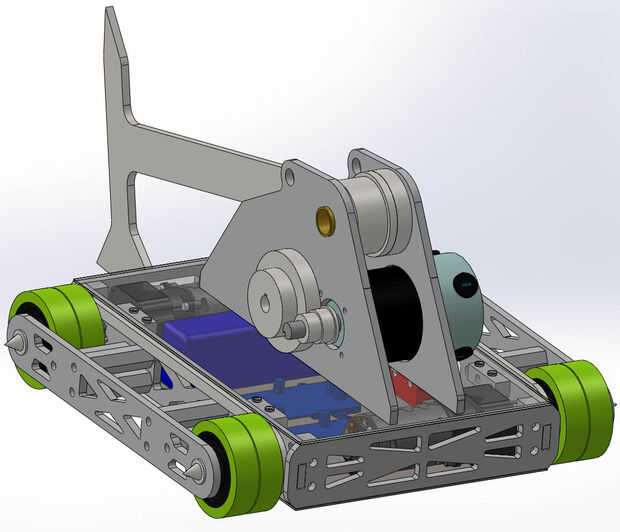
Diseño del elevador
Para el elevador seleccionó un motorreductor de DeWut de e0designs.com. El DeWut es un motor de taladro Dewalt en un soporte personalizado con un eje de salida personalizada que lo hace idóneo para robot de combate. El DeWut se utiliza en baja velocidad con dos etapas de reducción 3:1 añadido a combinar una reducción total de 460.8:1. Esto, combinado con la limitación de corriente en la Ragebridge se establece en 50A significa que teóricamente sería capaz de levantar 75 kg en la punta de la 23" brazo de la horquilla. Esto fue diseñado para exceder considerablemente el límite de peso de 30 libras de la clase porque además de reducir la tensión sobre la caja de engranajes y el motor, también asegura si lo opositores centro de masa está más lejos del eje de la punta del brazo menos será capaz de levantar su peso. Un elemento de diseño adicionales para abordar las altas cargas en el elevador sí mismo fue la adición de 3 1/4" espesor las placas de aluminio a cada mitad del brazo elevador. El brazo y los tres platos son codificados para distribuir mejor las fuerzas durante un levantamiento o una sacudida repentina en el brazo.
Con este módulo también existe un conjunto adicional de estabilizadores añadido. Estos estabilizadores ayudan al robot levantar a un oponente sin que se vuelque. Sin ellos, si el centro de gravedad combinado de ambos robots fue por delante de las ruedas delanteras caería hacia adelante. Estos estabilizadores mover ese punto de varias pulgadas frente al chasis principal del robot, lo que le permite levantar la mayoría de los opositores no hay problemas de estabilidad.
Diseño del hacha
Con el hacha el diseño comenzó como una idea muy simple: construir un hacha eléctrico con un A28-150 para el motor del arma. A28-150 ve usa regularmente como el motor del arma de 30-60lb hilanderos y como el motor de accionamiento de robots tanto como 220lbs de peso. Un elemento que a menudo se pasa por alto en armas hacha eléctrica es que tienes que volcar tanta energía en el brazo de hacha como sea posible en 180 grados o menos. Esto significa incluso con un motor bastante de gran alcance arma que probablemente necesitará añadir engranaje importante para maximizar la salida de energía. Lo ideal sería que el motor alcance máximo RPM como entra en contacto con el oponente, sin embargo calcular el sistema para ese nivel llevaría mucho esfuerzo, por lo que se establecieron en la opción "bastante buena" de una relación de 1:18, que con el martillo previsto poner el tamaño el motor hasta más de 4000 rpm por el punto previsto de impacto.
La pregunta que sigue es ¿Cómo mantienes el motor de explosión debido a un choque repentino de carga? Hay no hay una respuesta correcta, sin embargo el enfoque que tomé fue integrar un esfuerzo de torsión embrague limitador en el brazo del martillo sí mismo. El embrague del esfuerzo de torsión está clasificado para 60ft-lbs de torque y con el límite de corriente previsto 140A y proporcionando aproximadamente 66ft-lbs de torque en el eje de engranaje, hace para un gran ajuste. Ahora, en vez de venir a un alto discordante, el motor es capaz de desacelerar durante un período relativamente grande.
Geartrain para el hacha utiliza los mismos engranajes modificados que el elevador se utiliza para la reducción inicial de 9:1, sin embargo para el hacha hay una etapa de reducción adicional de 2:1 realiza a través de cadena de rodillos. Usando reducción de cadena me permitió mantener las dos etapas iniciales del engranaje más bajo en la Asamblea, bajando el centro de gravedad de todo el sistema.
El eje sí mismo utiliza triangulación pesado de las áreas de reducción de peso para minimizar la pérdida de resistencia del material eliminado. La punta principal impacto está diseñada para proporcionar un equilibrio entre perforación y embotado de la fuerza. Mientras que un punto muy agudo sería mejor en la armadura penetrante, también sería mucho más rápidamente que el estilo de la lámina utilizado embotado. Esta forma es bastante buena para la perforación, pero tiene suficiente material en la punta que incluso contra materiales más duraderos no es propensa a deformación notable. El hacha más tradicional en forma de cabeza es principalmente para mover más masa hacia fuera en el borde de la arma pero también es un arma capaz de picar y debe se adapta mejor a un oponente puede girarse hacia el frente por quitar el eje impulsor y el embrague del esfuerzo de torsión los bancos.
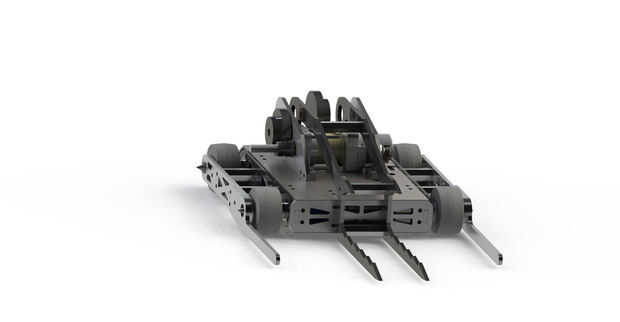
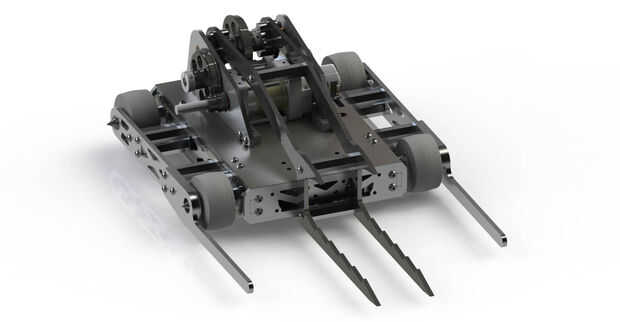
Diseño de la trituradora
La trituradora utiliza un par de actuadores lineares Gimson robótica GLA750-S para la espiga machacante. Cada actuador es capaz de entregar 500 libras de fuerza y puede ampliar a 2 pulg/seg. La fuerza en la punta de la espiga se calcula con los coeficientes de acoplamiento y un límite de corriente en el Ragebridge que pone los motores a la máxima potencia (23A, 500lbf) 670 libras. Para hacer frente a esta fuerza, los árboles de acero templados se utilizan tanto en la parte posterior de los actuadores del eje del arma. Los puntos de montaje posterior en los actuadores y los extremos del eje de salida han sido taladrados a 3/8" y 1/4" respectivamente, para aumentar la resistencia de cizalla de los ejes que se conectan a.
La porción de toda arma del módulo está diseñada para flotar. La ventaja de este arreglo es que si la parte inferior del robot opuesta es superior a la posición baja del brazo se levante automáticamente en el oponente, proporcionando un agarre firme sobre el oponente y mantener las ruedas de tracción a las cuatro en el suelo.
La parte superior de la porción de montaje del módulo de arma está diseñada para limitar el recorrido vertical total del brazo para que no potencialmente obtener volcó en combate. La forma de la montura también funciona como una jaula del rodillo para los actuadores, protegiéndolas de daños debe dar la vuelta al robot. Este es el único accesorio que no es capaz de self-righting y como tal no está diseñado para uso contra oponentes que puedan mover de un tirón el robot.

")



 - previene el pie de pivote Slacking por los ladridos")







