Paso 5: levantador
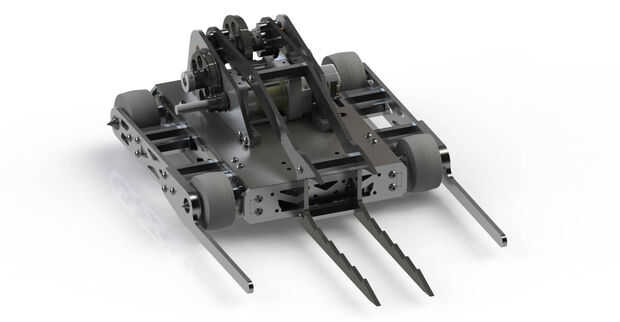



El mecanismo elevador era siguiente en la lista. Utiliza dos etapas de reducción 3:1 utilizar un engranaje de 16 pitch modificado de McMaster-Carr a Conecte el motorreductor DeWut con el eje del elevador.
Esfuerzo de torsión se transmite a la palanca por medio de 2" de ranura que es proporcionada por colocando los brazos acero con varias 7075 placas de 1/4" adaptador. Los brazos y las placas fueron cortadas en un chorro de agua con la ranura en el perfil. Debido a la naturaleza del chorro de agua corte los recortes era necesario tener las ranuras acabado para proporcionar las esquinas adecuadas. Esto se hace con una prensa de árbol de dos tonelada y una brocha. Emperna cada mitad juntos antes de brochado aseguró que el perfil de la ranura final alinearse a través de todo el conjunto.
La primera parte atornillada en la estructura de aluminio fue el motor del engranaje de DeWut que tenía entonces el engranaje, cuadrangulares y el eje cuello instalado. 3" diámetro, 48 dientes engranaje y eje cuello fueron atados en el extremo del eje intermedio y se resbaló en su lugar. Mientras desliza el eje a través del buje collares de eje, arandela de empuje los engranajes se resbalaron en el eje mientras que adyacente a la porción de la caja de engranajes del motorreductor DeWut.
Después de que el eje trasero fue insertado en el mismo plato y cada pieza del brazo elevador y engranaje se resbaló en con sus cuadrangulares. arandelas de 1/16" y 1/8" fueron utilizadas para establecer el espaciado. Una vez que todo estaba instalado y los espaciadores para el brazo de elevación fueron Unidos se añadió la otra placa y un collar de eje fue agregado en el exterior de ella para evitar que caiga.
En el elevador las pruebas ha demostrado para ser fácilmente capaz de levantar otro robot de 30 libras al usar los soportes para apoyar el centro de gravedad cambiante.

")



 - previene el pie de pivote Slacking por los ladridos")







