Paso 4: Los "ojos" de nuestro robot
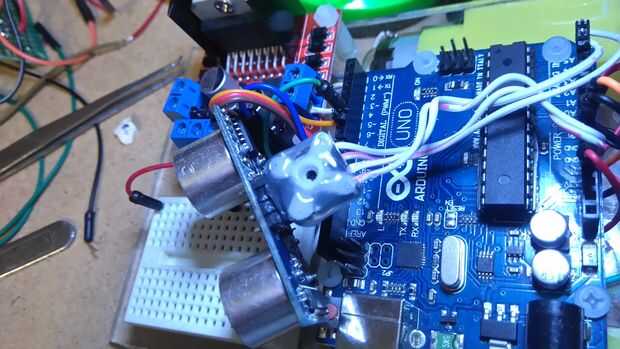

Use un pegamento para unir el motor servo pequeño en la parte frontal de nuestro robot. Ver la primera imagen arriba para entender como poner el sensor de ultrasonidos en el motor servo utilizando una pieza del engranaje pequeño.
El segundo por encima de la imagen muestra la parte completa que será los "ojos" de nuestro robot.








")




