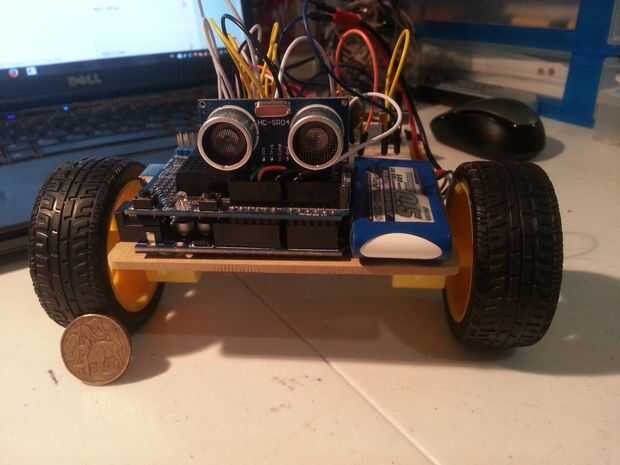
Lo que hay que hacer es.
1. Arduino uno.
2. kit de chasis de algún tipo.
3. L293D Motor chip de conducción.
4. energía flexible que utiliza 0,5 mah li-po batería en 7.4v
5. un montón de cables
6. ultra distancia sonic
7. potenciómetro
Cuando pones el código en el robot irá hacia adelante, cuando el sensor ultra sonic detecta algo se invierta y gire a la izquierda.













