Paso 2: Principio de funcionamiento
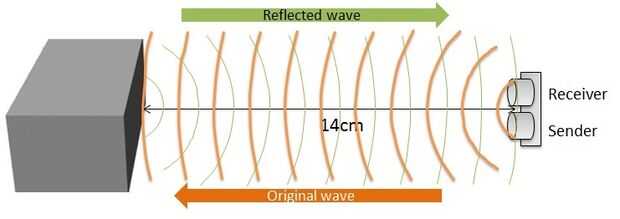
El vehículo robótico de evitación de obstáculo utiliza sensores de ultrasonidos para sus movimientos. Una familia de UNO de Arduino se utiliza para lograr el funcionamiento deseado. Los motores están conectados a través de conductor del motor IC a Arduino uno. El sensor ultrasónico se une delante del robot. Cada vez que el robot va por el camino deseado el sensor ultrasónico transmite ondas ultrasónicas continuamente de la cabeza del sensor. Cada vez que un obstáculo antes de que las ondas ultrasónicas que se reflejan detrás de un objeto y que la información se pasa a la arduino. Arduino controla los motores basados en señales ultrasónicas.







")





 Cómo hacer un OAWR (obstáculo evitando caminar Robot)")