Paso 3: Vamos a hacer el ROBOT:
Fijar las ruedas en el chasis de metal y montar los motores Dc BO en la rueda trasera y arreglar una rueda giratoria en la parte delantera.
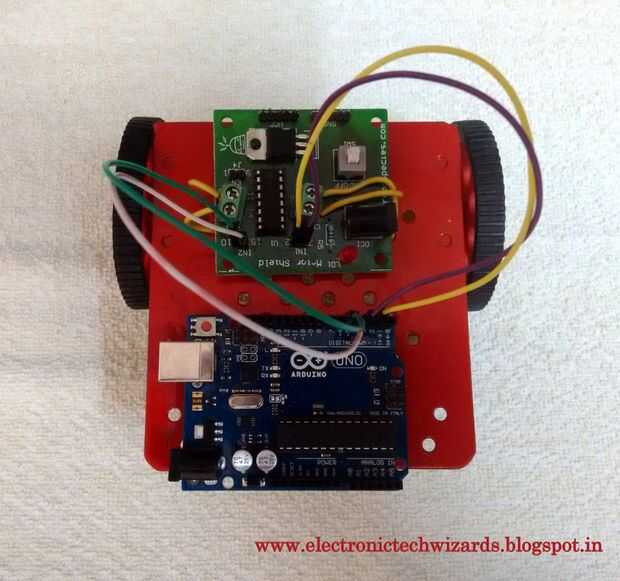
conectar el controlador de motor L293D con los motores de corriente continua y arduino.
CONEXIONES:
3,6(L293D) a motor(output) izquierdo
11,14(L293D) a motor(output)
2,7,10,15(L293D) para pernos 2,3,4,5 de Arduino(inputs)
Nota: se puede utilizar un CI l293d o un módulo de Ready-Made, cada módulo es diferente así que cheque diagrama de pin IC L293D para hacer las conexiones correctas.







")





 Cómo hacer un OAWR (obstáculo evitando caminar Robot)")