Paso 3: Cortar las piezas de acrílico


La plataforma inferior se muestra en la primera imagen a continuación. Tiene agujeros de montaje para los motores, las ruedas, los titulares de la batería y para los tornillos que se utilizan para sostener la plataforma superior. Hay un agujero central para pasar los cables de potencia del motor hasta la plataforma superior. Usted debe comprobar para asegurarse de que los agujeros para el soporte de la batería y ruedas alineen correctamente ya que los tienes pueden no ser exactamente lo mismo que el mío: Si no coinciden usted necesitará modificar el archivo DXF en consecuencia.
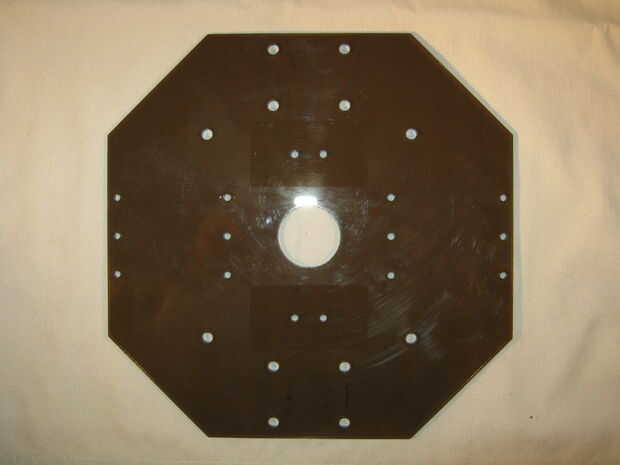
La plataforma superior se muestra en la segunda imagen de abajo. Hay agujeros para tornillos de la plataforma inferior, para el sello de Junta de educación básica y un agujero central para pasar los cables de las baterías y motores hacia arriba a la Junta de educación. Si va a utilizar un Arduino u otro microcontrolador, necesita cambiar el archivo DXF para reflejar los agujeros de montaje de la Junta.
Usted también necesitará los soportes del motor. Los soportes son necesarios para asegurarse de que las ruedas en línea de motor con las ruedas en las ruedas - desea que el robot completamente plana y no tambalee. Basado en las ruedas utiliza, tenía que usar dos piezas de acrílico para cada motor: 1/8" de espesor y uno 1/16" de espesor. El diseño de la misma para ambos espesores: utilizar el mismo archivo DXF para cortar todos los espaciadores.
Los archivos DXF que utiliza se adjuntan a continuación. Nota: el título de los archivos dice "Hexágono" pero que realmente contienen el patrón del octágono.


 dentro de la caja (Cómo grabar y mostrar múltiples dibujos en acrílico transparente)")










