Paso 4: La electrónica




Fuente de alimentación:
oiO utiliza una batería 11,1 voltios 1300mA recharchable, utilizada principalmente por autos y aviones RC. Con esta batería, oiO puede funcionar autónomamente 13 horas. Más tarde, estoy planeando usar el modo sleep de Arduino y algunos otros trucos para reducir el consumo de energía de oiO.
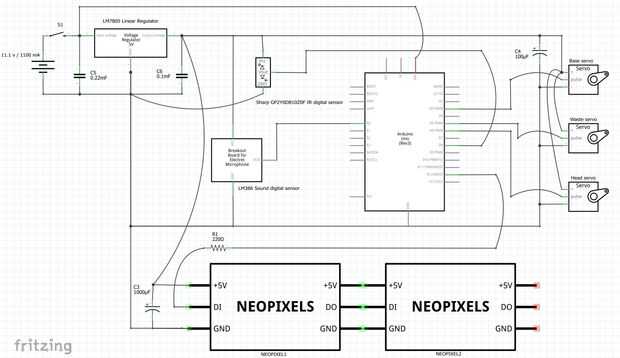
Ya que tengo algunos componentes hambrientos de energía (3 servos y 2 NeoPixels), así que he proporcionado una fuente de alimentación regulada de 5v (1amp máx.) con el regulador de voltaje lineal 7805. Para Arduino, es alimentado también externamente, sino a través de su propio regulador de potencia. De esta forma que tengo una total separación entre las cargas capacitivas y Arduino. También he añadido un 100mF en el +-potencia de ferroviario en servos, esto ayudará a mantener la tensión constante cuando los servos hacen movimientos bruscos. Además, el equipo de Adafruit recomienda un capacitor de 1000mF a la NeoPixel +-entradas de alimentación, así que este añadido también.
El sonido y sensores de proximidad infrarrojos también se alimentan de la fuente de 5v regulada independiente.
No se olvide deconectar la fuente externa de tierra a uno de la Arduino de tierra pines
Se añade un interruptor entre la batería y el reset del circuito. Poner el interruptor en el cable positivo de la batería, esto es en línea con la recomendación de Adafruit siempre conectar el lado positivo después de la tierra. y viceversa al desconectar)
Controles de salidas
Servos:
Los 3 servos son controlados con un PWM línea de señal de cada uno, fácilmente proporcionada por Arduino a través de su librería Servo.h. Conecté los servos como sigue:
Servo1 (pierna): pin 3
Servo2 (Residuos): pin 5
Servo3 (Cabeza): pin 6
NeoPixels:
2 píxeles se controlan mediante control sólo 1 línea (a través de un resistor de 470 ohm según lo recomendado por Adafruit). el control utiliza un protocolo digital (I2C) e implementación propietaria para controlar cada píxel por separado. el resultado final es que puede fácilmente controlar pixeles uno o todos a la vez y establecer muy precisa e impresionante color de cada píxel. el consumo de energía por píxel en el 100% del brighness es 66mA. (ADVERTENCIA: Evite mirar directamente hacia los leds cuando estén en)
Control de NeoPixel se realiza a través de Arduino pin 12
Entradas
Sensor de proximidad de infrarrojos:
El sensor utiliza se encuentra generalmente en robots para detección de bordes simples (evitar caídas, paredes... etc). Tiene una salida digital, es decir, da alta cuando un objetos es aprox. 10cm de distancia, o baja, si no encuentra ningún obstáculo. no ofrece distancia. hace que usando un chip de a bordo, también un rojo SMD led se enciende en el sensor cuando el sensor detecta un obstáculo.
Salida del sensor de proximidad es leída por el Arduino en el pin 8
Sensor de los sonidos:
Este sensor que utiliza tiene también una salida digital, lo que significa que no te da cómo se carga el sonido o su contenido en frecuencia, sólo establece su salida en alta cuando se detecta un sonido, de lo contrario, la salida se ajusta a la baja. Puede aumentar o disminuir la sensibilidad girando el mando de a bordo. Volviendo al ajuste máximo, soy capaz de hacer oiO detectar un clap en cualquier lugar en la sala, ya que es un agudo y fuerte palmada (estoy pensando en construir mi propio amplificador oiO puede responder a sonidos más sutiles, y también para tener un VCG (ganancia controlado por voltaje) esto me permitirá dinámicamente aumentar o disminuir la sensibilidad de oiO a sonidos como parte de su comportamiento :))
La salida del sensor de los sonidos es leída por Arduino en analog pin A0. Pero ya que es un sensor digital, puede conectarse a cualquiera de los pines digitales del Arduino y utilizar digitalRead(pin) en lugar de lo que estoy usando ahora analogRead(A0). Ambos funcionarán bien.
Poniendo todo junto:
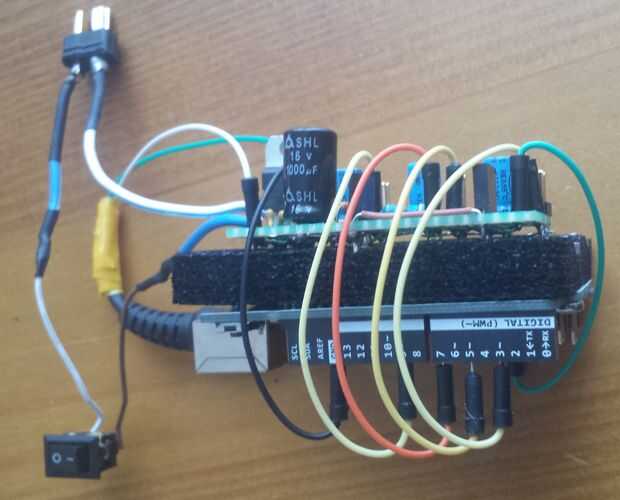
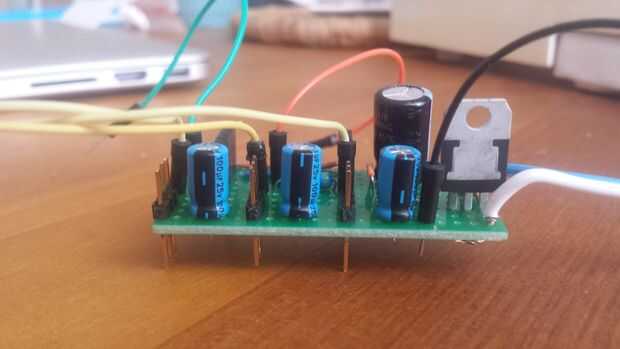
Es la llamada si usted quiere diseñar un PCB para conectar todos los componentes, simplemente usar un protoboard, o te gusta lo que hice. Utiliza un PCB preperforado y soldadas todas mis piezas, conectores y cables según, la conexión que se muestra en el diseño. Entonces, he utilizado cables de puente para pasar de esta placa de conexión a Arduino, finalmente conectar la batería, el interruptor y un conector de barril de 9v para conectar Arduino a la batería y poner todo en una caja (utilicé la caja que vino con mi celular, después he rociado en gris oscuro:)) Hice algunas aperturas para el USB, cargador, servos y sensores cableado.





")







