Paso 4: Montaje del servo y a la programación
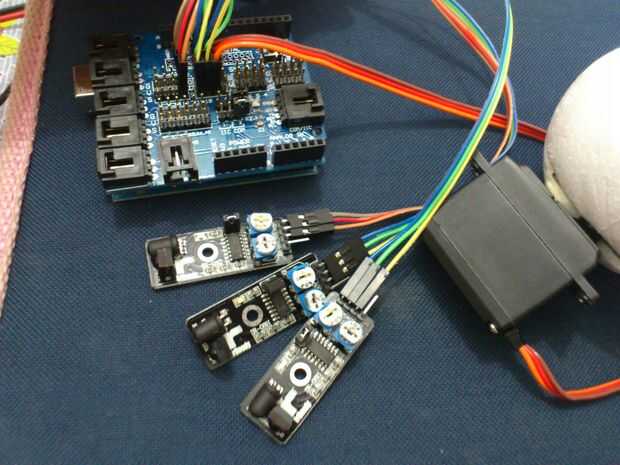
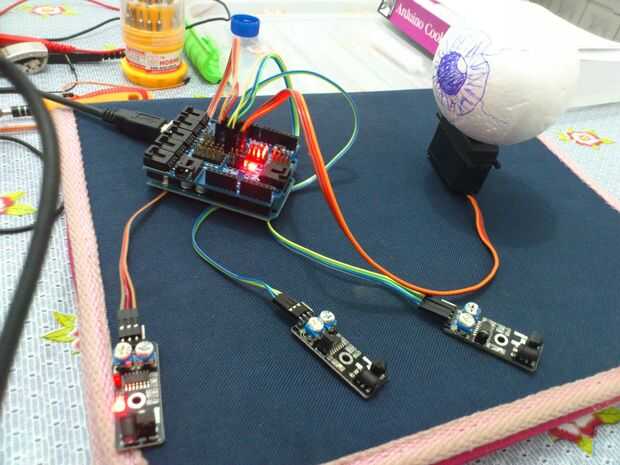
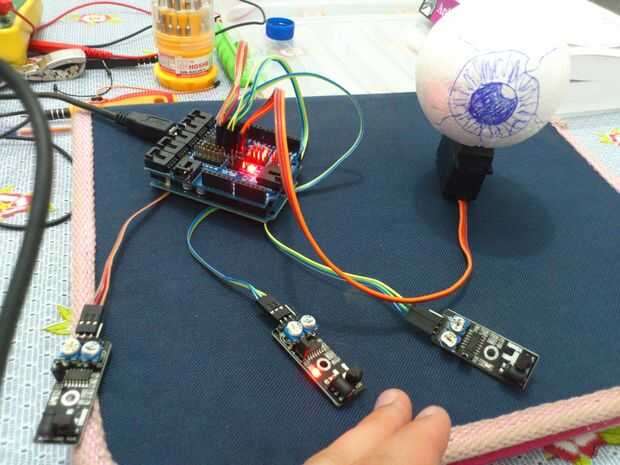
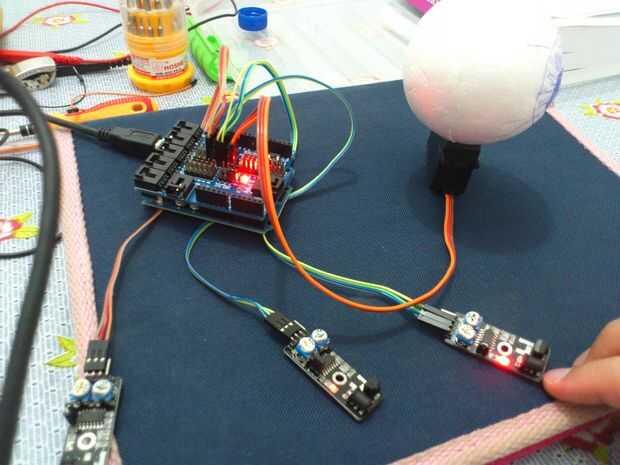
El ojo funciona como sigue: para detectar un objeto frente a cada sensor (hasta 40 cm, ajustable), los cambios de sensor del estado a la salida de Hi Lo (de 5volts a cero) entonces la Arduino dan cuenta de que había un estado de cambio en uno de sus puertos por lo tanto, según el software, el servomotor para girar el ojo a la posición preestablecida.
Esto fue una aplicación del uso didáctico de los sensores infrarrojos. Muchas otras aplicaciones son posibles. El límite es tu imaginación. Esperamos que disfrutéis.
Software:
#include < Servo.h > / / incluye biblioteca de servo
Servo pescoco; crear objeto servo para controlar un servo
int pos = 0;
int irdireita = 10;
int iresquerda = 12;
int ircentro = 11;
tempo de int = 50;
void setup () {}
pescoco.Attach(9); se fija el servo en el pin 9 al objeto servo
pinMode (irdireita, entrada); configurar pin irdireita (pin10) como entrada
pinMode (iresquerda, entrada); configurar pin iresquerda (pin12) como entrada
pinMode (ircentro, entrada); configurar pin ircentro (pin11) como entrada
}
void loop() {}
int valdireita = digitalRead (irdireita);
int valesquerda = digitalRead (iresquerda);
valcentro int = digitalRead (ircentro);
Si (valdireita == LOW) {}
pescoco.Write(180);
POS = (180);
retardo (tempo);
}
otra cosa if(valesquerda == LOW) {}
pescoco.Write (0);
POS = (0);
retardo (tempo);
}
else if (valcentro == LOW) {}
pescoco.Write (90);
POS = (90);
retardo (tempo);
}
Else {}
pescoco.Write (pos);
retardo (tempo);
}
}





")







