Paso 4: Monte su electrónica cable lejos!
SERVOS: Asegúrese de configurar tus servos a la posición cerrada o abierta a través de Arduino, y luego conecte su cuerno del servo (brazo) en consecuencia. Este bosquejo puede ayudar. Recuerde, no todos los servos van a 0 o 180! Los servos 313WP sólo van de 20 a 160 grados. Una vez establecido en consecuencia, pegamento caliente la varilla en el cuerno del servo (brazo). Luego pegar con cuidado el servo a la sección de móvil y la barra de la sección estable. Dar el espacio suficiente para las secciones abrir y cerrar sin chocar entre sí. Deje un poco espacio para los cables.
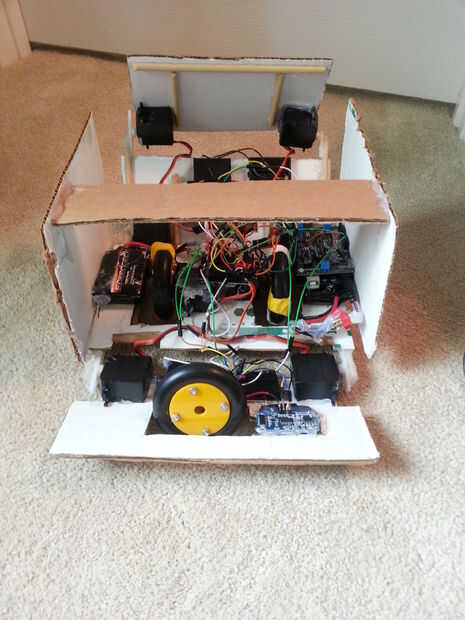
Baterías: mina pongo a ambos lados de las ruedas fijas.
Arduino: pongo minas en la parte superior de las pilas.
Sensor de ultrasonidos: sólo usé uno en la parte delantera al lado de la rueda. Realmente puede ir en cualquier lugar, y puede utilizarse más de una. Sólo ajustar su programa por consiguiente!
Monte una placa por cada neumático plegable y 1-2 en el centro. Esto es donde van los sensores de inclinación.
Ruedas: Puedes ver dónde pongo el mío. Si no tocan el suelo, entonces utilice sugru para ampliar las ruedas! (Es el amarillo, blanca y negra cosas sobre mis ruedas fijas).
Asegúrese de utilizar suficiente pegamento caliente! Oh y no quemarse como hice yo XD
Cableado es fácil pero requiere mucho tiempo.
Tendrá que dejar el alambre extra para evitar que las conexiones entren deshacer cuando el robot desarrolla (alambre con él desplegado y dejar un pequeño cable extra). Comience por conectar la tierra de la batería extra para el Arduino y las salidas de Arduino a la placa fija. Alambre en consecuencia a partir de ahí. El sensor ultrasónico utiliza pin de 5v de Arduino. Para usar la inclinación sensor sólo tiene que añadir uno de su de servo o de motor de la c.c. del alambre a un extremo y luego conecte el otro extremo a la correcta. Cuando la bola está hacia abajo de la corriente pasará a través. Jugar con él por lo que sólo permite corriente recorrer cuando está desplegado al lado.
Pega los lados de tu robot en una vez que el cableado y el montaje se completa.








")




