Paso 1: El controlador


=================================================================================
Introducción
=================================================================================
Este escudo del motor permite a Arduino controlar dos motores DC de canal. Utiliza un chip L298N que entrega canal de salida de corriente de hasta 2A cada uno. El control de velocidad se logra a través de PWM convencional que puede obtenerse de Arduino PWM de salida del Pin 5 y 6. Activar/desactivar la función de control del motor es señalada por Arduino Digital Pin 4 y 7.
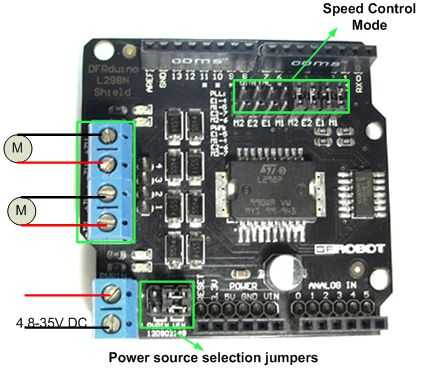
El protector del Motor puede ser alimentado directamente de Arduino o de fuente de alimentación externa. Se recomienda utilizar alimentación externa para poder el escudo del motor.
Logic Control Voltage5V (de Arduino)
Motorizado Voltage4.8 ^ 35V (de Arduino o fuente de alimentación externa)
Lógica actual Iss≤36mA de la fuente
Motor Driven actual Io≤2A
Potencia máxima consumption25WT = 75
Modo de control de velocidad de PWMPLL
Nivel de señal de control:
High2.3V≤Vin≤5V
Bajo-0.3V≤Vin≤1.5V
==================================================================================
Asignación de PIN
==================================================================================
"Modo PWM"
Pin función
Control digital de dirección del Motor 2 4
Control digital de Motor PWM 2 5
Control digital de Motor PWM 1 6
Control digital de dirección del Motor 1 7
"Modo de PLL"
Pin función
Control digital de Motor permiten 2 4
Control digital de dirección del Motor 2 5
Control digital de dirección del Motor 1 6
Control digital de Motor permiten 1 7
==================================================================================
Código de ejemplo
==================================================================================
Control de velocidad PWM
Control de velocidad PWM de Arduino
int E1 = 6;
int M1 = 7;
int E2 = 5;
int M2 = 4;
void setup()
{
pinMode (M1, salida);
pinMode (M2, salida);
}
void loop()
{
int valor;
para (valor = 0; valor < = 255; valor += 5)
{
digitalWrite(M1,HIGH);
digitalWrite (M2, alto);
analogWrite (E1, valor); Control de velocidad PWM
analogWrite (E2, valor); Control de velocidad PWM
Delay(30);
}
}
=======================================
Control de velocidad PLL
Control de velocidad de PLL de Arduino
int E1 = 7;
int M1 = 6;
int E2 = 4;
int M2 = 5;
void setup()
{
pinMode (M1, salida);
pinMode (M2, salida);
}
void loop()
{
int valor;
para (valor = 0; valor < = 255; valor += 5)
{
digitalWrite(M1,HIGH);
digitalWrite (M2, alto);
analogWrite (E1, valor); Control de velocidad PLL
analogWrite (E2, valor); Control de velocidad PLL
Delay(30);
}
}
==================================================================================
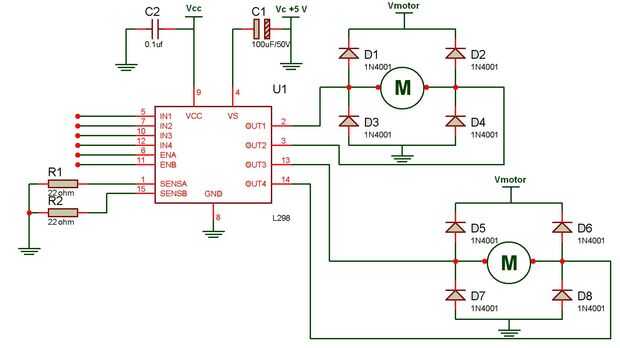
Driver motor L298
=================================================================================
Uso de ventilador
El código:
void kipas()
{
digitalWrite (kipasPin1, HIGH);
digitalWrite (kipasPin2, bajo);
digitalWrite(enablePin,HIGH);
Delay(1000);
}
void kipas_mati()
{
digitalWrite (kipasPin1, bajo);
digitalWrite (kipasPin2, HIGH);
digitalWrite(enablePin,LOW);
Delay(1000);
}
=======================================================================================
Fuente:
http://www.DFRobot.com/wiki/index.php?title=Arduino_Motor_Shield_%28L298N%29_%28SKU:DRI0009% 29
PDF:
http://droboticsonline.com/ebaydownloads/L298_Motor_Shield_Manual.pdf


 de tambor y FAQ")










