


Arduino es una gran cosa a menos que sepa cómo usarlo. Pero cuando bluetooth y arduino entran en juego, su aún más divertido. Así que aquí se presenta otro gran proyecto que utiliza arduino como su cerebro y bluetooth para las comunicaciones. Esta es una nueva versión de mi proyecto anterior - Laptop controlada por robot v1.0. Como resulta claro del nombre, este robot puede ser controlado a través de un ordenador portátil o pc que tiene blutooth. Ya que el bluetooth también está presente en los teléfonos android, el robot puede ser controlado también usarlo. Este robot es tan talentoso que puede decir la temperatura de su entorno, la distancia, hasta qué punto un obstáculo está presente y la imagen del entorno a través de una cámara. Como esta es una nueva versión, se hacen muchos cambios y nuevas características se agregan hace que sea aún mejor. Pero la pregunta que ¿cómo funciona?
El proyecto utiliza un arduino que está conectado a un módulo de bluetooth que produce una conexión inalámbrica entre un portátil y el arduino. Así que cuando presiona un botón en nuestro portátil, datos es enviados a través de bluetooth en la computadora portátil y recibidos a través del módulo de bluetooth presente en el robot. Los datos se transmisión entonces a arduino que está programado de forma tal para aceptar los datos, procesarla y realizar una tarea mencionada en ese tipo de datos. Por ej. Si pulsa un botón que se mueve el robot hacia adelante, el arduino recibe el comando a través de bluetooth y establece dos de los pernos de alta como está programado para hacerlo. La señal es transmitida al motor conductor ic que conduce la corriente a los motores y el robot se mueve hacia adelante. No sólo bluetooth sino otras formas de conectividad como wifi, internet también puede ser utilizado aquí.
Aquí están las actualizaciones y modificaciones en el robot en comparación con el anterior:
- Utiliza un Arduino nano en lugar de uno que ahorra espacio y reduce el coste.
- Es alimentado por una batería nominal de 8v y 1.0Ah a diferencia del anterior que utiliza una batería de 12v grandes y pesados. Las baterías son baratos, pequeños y ligeros.
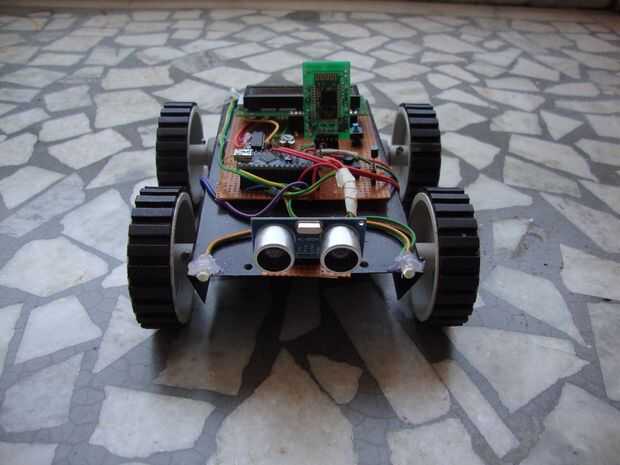
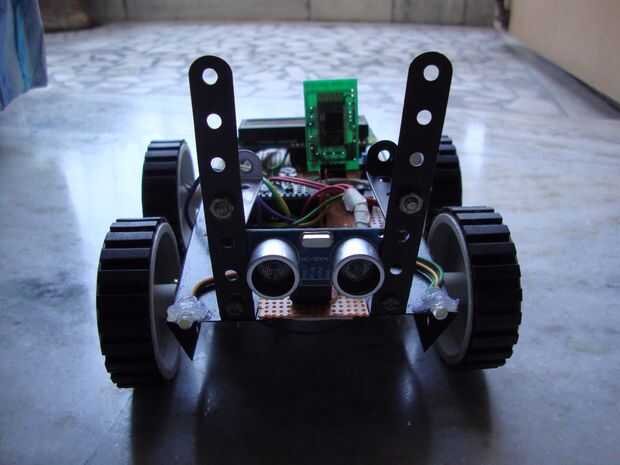
- Utiliza sólo dos motores en lugar de cuatro que reduce costos y ahorra energía otra vez. Las ruedas delanteras son apoyadas por un eje metálico.
- Utiliza un circuito totalmente soldado mientras que anterior protoboard para conexiones por lo que las posibilidades de que el circuito no funciona menos.
- Tiene un sensor de temperatura adicional que le puede decir la temperatura del entorno del robot.
- Tiene un sensor de ultrasonidos adicional que indica la distancia en centímetros y hasta qué punto un obstáculo está presente.
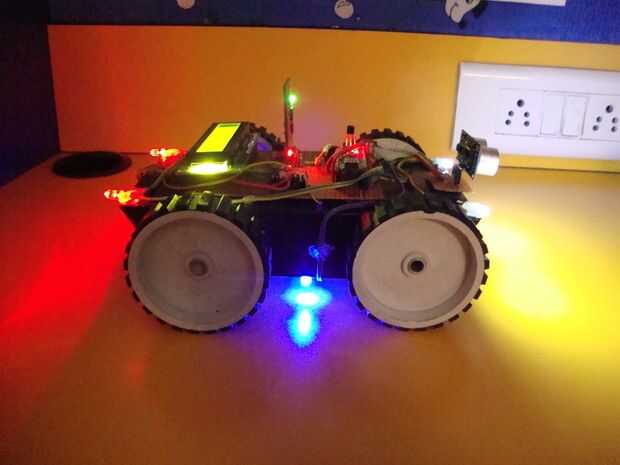
- Tiene un textos de pantalla a pantalla de cristal líquido, temperatura, distancia y datos.
- Ha añadido azul led luces de neón que se ve al robot por la noche.
- Ha añadido zumbador que actúa como un cuerno para el robot.
- Una pinza que puede contener un teléfono que puede actuar como una cámara inalámbrica se ha conectado a la laptop.
Próximamente un video del robot en acción. No subirlo ya que estaba corto de tiempo.
Por favor, vote por mí en el concurso si te gusta este proyecto.


")


")







