Paso 5: creación de prototipos
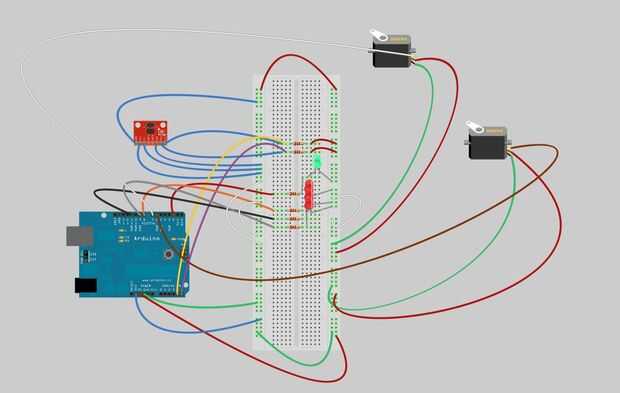
Servos son controlados con señales PWM (pulse-width-modulation) control digital de Arduino.
El cable de control (cable blanco) está conectado al pin digital de Arduino 6 o pin 7.
El cable rojo está conectado a + 5v power. Nota sobre el diagrama de la placa de prototipo que los bloques de bus de energía se dividen en el medio. Puentes de un lado para continuar el 3.3v carril y 5v aislado para los servos.
El cable negro está conectado a tierra.
Si va a proporcionar una alimentación independiente para los servos, como se recomienda, no para sacar mucha potencia a través de Arduino, el suelo debe ser común con el arduino lo contrario que no funcionará la señal.
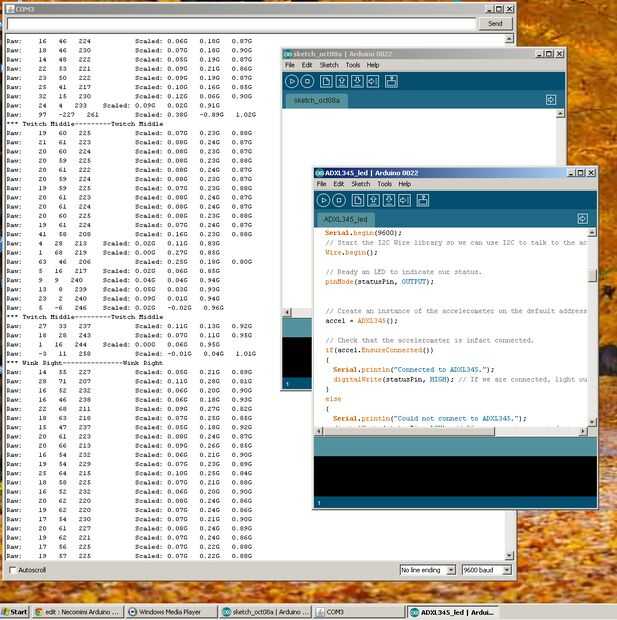
Estaba tratando de ver qué tipo de datos salía el ADXL345 para ver cómo podría usarlo como un sensor de inclinación.
Comentarios sobre la decisión de la Junta que las marcas de referencia del eje están equivocadas así orientan a la Junta Directiva de diferentes maneras y ver cómo cambian los datos.
Modifique el código en consecuencia.
Consulte los comentarios en el código para ver lo que hace cada paso.
Para imitar una acción realista, tenía que poner un retraso cada vez que los servos terminar su acción. Los oídos sería constante movimiento la persona que usa este me alojé completamente todavía.
Supongo que tendría que ser un verdadero animal conductista para averiguar todos los movimientos para programar en. Usé asunciones básicas para crear el algoritmo en cómo reacciona a los valores de acelerómetro.
Una simple inclinación a un lado, inclinación hacia adelante y la inclinación hacia el otro lado es todo lo que trabajé. Tendría que observar los datos de los diferentes movimientos de los sensores. Utilice los datos o valores de g-force se puede convertir.







")
")




