Paso 2: ADC Buffer / mecanismo del disparador
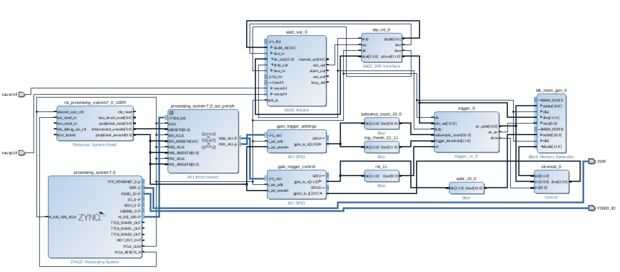
Esta porción del diseño es responsable de muestreo de la señal de entrada, provocando en un evento de forma de onda y a disposición de los datos para el PS cuando termine.
-processing_system7_0: Zynq PS
-rst_processing_system7_0_100M: parte de la comunicación de AXI (agregado en la automatización de la conexión)
-processing_system7_0_ai_periph: parte de la comunicación de AXI (agregado en la automatización de la conexión)
-xadc_wiz_0: implementación de XADC. Configurado en DRP, modo de canal único, con tasa de conversión máximo (real de 961KSPS). VAUX14 se ha configurado en modo bipolar.
-gpio_trigger_settings: GPIO IP utilizado para establecer este método y activan umbral. Este método se refiere a elegir la frecuencia de aceptar un valor de entrada de la ADC. Si la base de tiempo del telescopio es zoom hacia fuera para un largo período de tiempo, el búfer será demasiado pequeño para llenar para arriba (por ejemplo) de 1 segundo de datos tomados en 1MSPS. Umbral de disparo se refiere al nivel de tensión en que el disparador se produce en el.
-gpio_trigger_control: IP GPIO. Canal 1 es de salida, capaz de restablecer el gatillo (cuando PS está listo para un nuevo búfer de datos) y afirmar el valor de la dirección de la memoria a ser leída. Canal 2 es una entrada, permitiendo la lectura de los datos de salida del búfer de datos, la última dirección escrita, y si ha llenado el buffer del trigger para arriba sin embargo.
-drp_int_0: mi IP para interpretar la salida de PRM de la XADC.
-trigger_0: mi IP para implementar el comportamiento gatillo
-blk_mem_gen_0: IP para tenencia pasado muestra valores.
Se incluyen archivos de SystemVerilog para todos mi IPs para esta sección.

 para osciloscopio digital Velleman HPS140")











