Paso 4: Principal propulsión y manejo




Un cepillado motor de la C.C. de un servo micro de alto voltaje se utiliza como propulsión principal. Obtiene con cables y un conector de conexión del conector de salida de la ESC. Una pequeña salida para cepillado motores y adecuado para 2s LiPo se utiliza. Como normalmente se utiliza en los aviones no tienen reversa.
El motor se monta en el cuerno del servo del otro servo micro de alto voltaje (por una vez metemos). Un cintillo y un tornillo le permiten orientarse hacia arriba (como se explica en el paso anterior. Yo no he puesto el servo completo en un ángulo, porque de esa manera cambiaría el ángulo del motor al girar.
Primero probé con un servo especial de 180° de giro más corto, pero que resultó innecesario, aproximadamente 45° a cada lado es suficiente para cerca "sobre el terreno" girando.
El servo es un cable de extensión a la unidad WiRC.
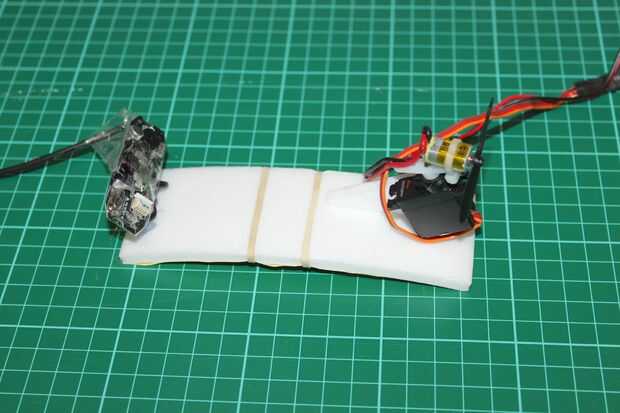
Un soporte de Depron se pega con pegamento caliente de baja temperatura. La base es curva de ajuste aproximadamente una esfera de 80cm de diámetro haciendo rodar un objeto redondo duro sobre él, con la hoja de la espuma sobre un cojín (véase mi Ible original). También sostiene la cámara, pegada con algún alambre de metal (según lo utilizado en el empaquetado) que se puede doblar la cámara el punto que quieras.
Finalmente, obtiene algunas bandas elásticas para mantener el lastre de la corte.








")




