Paso 5: Arriba-abajo propulsión


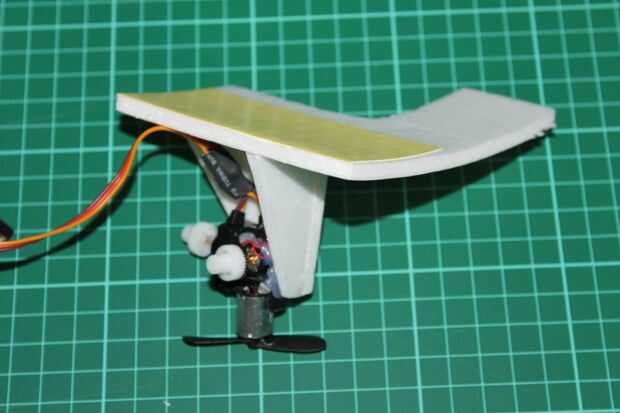




Prueba esto en 7,4 V demostró el motor calentando cuando se utiliza durante mucho tiempo. La propulsión de arriba-abajo se utiliza cerca continuamente, esto me preocupó. Pude ha actualizado el motor, pero después la electrónica no podría llevar a cabo en tensión. Y todos los servos de alto voltaje que pude encontrar son los tipos digitales, que no es interesante en este caso, como la respuesta digital no significa control proporcional de la velocidad de la hélice. Sin embargo la ESC de la propulsión hacia adelante tiene un BEC da 5V, es que los servos hackeados se diseñan para. Para no sobrecargar este BEC, sólo la propulsión de arriba-abajo es alimentada por él. Así el + cables de ambos el ESC conector a la unidad del receptor y el servo hackeado no conectados a la unidad de WiRC (funcionando totalmente con 7, 4V) y sacados los conectores y conectados entre sí con un pin de cabecera sola de doble longitud. Evidentemente esta conexión está cubierta para aislar eléctricamente del resto.
El apoyo sale un cortado para caber cerca de cierre del globo, justo en frente de él (ver más).








")




