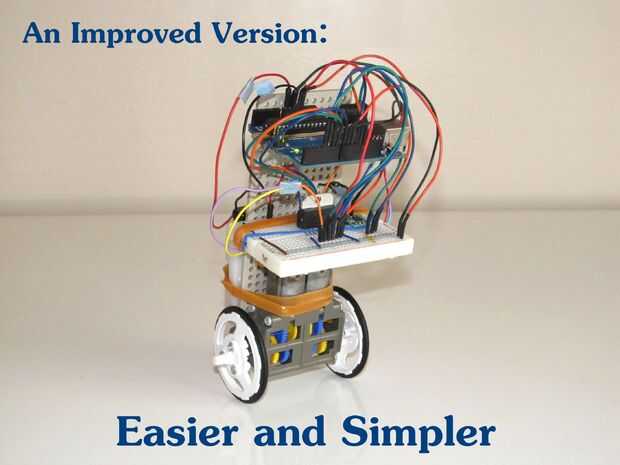
Se trata de una versión mejorada de mi anterior instructivo titulado "Un Simple y muy fácil invertido péndulo equilibrio Robot". Existen cuatro ventajas en esta versión.
- Más fácil conseguir un material
- Menos materiales necesarios
- Programa sencillo para equilibrar a sí mismo
- Mayor estabilidad en el equilibrio de
He publicado la versión original en inglés y japonés. He conseguido un número considerable de éxito comentarios con videos (por ejemplo, 1, 2, 3, 4, 5) a la versión japonesa pero raro a la versión en inglés. El primero y el segundo puntos arriba se basan en comentarios a la versión original en inglés. Estas dos mejoras podrían eliminar una barrera de residentes fuera de Japón. Debajo de la introducción video a continuación, se describen algunos detalles de cada uno estos cuatro puntos.
:
[Video de la introducción]
:
(1) Sensor giroscópico digital
En la versión original un módulo giroscopio con dos sensores de salida analógica (* 1) se utiliza. Pero fuera de Japón, no es fácil para él o su equivalente (* 2). En esta versión se utiliza un módulo de giro con un sensor de salida digital de STMicroelectronics. Es fácil que él o su equivalente ya sea dentro o fuera de Japón.
(* 1) Este sensor de la salida analógica no tiene ningún valor constante para la salida en reposo. Por lo tanto, es necesario medir el valor de la producción en el estado estático antes de sí mismo el equilibrio en la versión original. Pero no es necesario en esta versión.
(* 2). El módulo giroscopio utilizado en la versión original tiene contaminación de aceleración angular en velocidad angular a través de su HPF. Por lo tanto es necesaria una soldadura fina para cancelar esta contaminación. Sin embargo, no es necesario en esta versión mejorada.
:
(2) conductor del Motor solo IC
El robot invertido que hacemos aquí tiene dos motores. En la versión original dos ICs conducen respectivamente. Pero en esta versión sólo un IC unidades dos motores.
:
(3) no biblioteca de contador de tiempo en el programa
En la versión original una biblioteca del temporizadorMs Timer2, se utiliza en programa para el manejo de la interrupción (* 1). En esta versión no hay manipulación de la interrupción o no biblioteca de contador de tiempo se utiliza en programa (* 2).
(* 1) Mi proyecto original se inició con una simulación numérica en PC. El manejo de la interrupción sigue.
(* 2). Consulte a continuación.
:
(4) paso de reducción de ruido en el programa
En el programa, otra revisión se hace también para reducir el ruido en la salida del módulo giroscopio (* 2).
(* 2). Añadido un programa alternativo con esta revisa mi original (antes) instructable.
:
En siguiendo pasos no evitaré las mismas declaraciones que se describe en la versión original para hacer este instractable completo.
* Una versión en japonés de este instructable está disponible.


")


 centinela droide/Dancing Robot")



")



