Paso 11: Desarrollar Robot
Vamos a hacer tu robot invertida o tus conocimientos evolucionar más. Aquí tres formas se muestran brevemente. Sería difícil terminar dentro de medio día.
:
(1) control remoto operación con ningún cable
En el paso 9 tu robot es operado a través de cable USB. Ahora tu robot está desenchufado. Así que vamos a operarlo con ningún cable. En términos de simplicidad, un módulo infrarrojo sería la primera opción.
:
[Demostración de Robot por control remoto de un TV de funcionamiento]
:
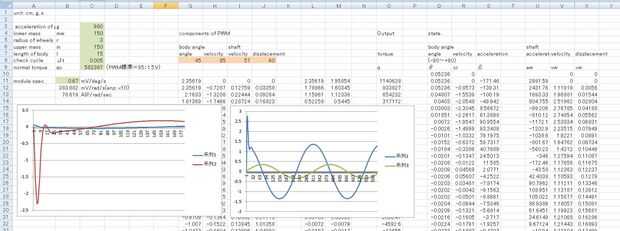
(2) que simula la acción de un Robot invertida con Excel
Nuestro robot invertida podría pensarse construido de tres partes: cabeza, cuerpo y ruedas. En esta simplificación, puede escribirse una ecuación de movimiento del robot con una física que aprendió en el Colegio. Como conseguir que, la acción del robot puede ser simulada usando Excel. Los valores cerca de-correcto de dos coeficientes en la Nota 4 en el paso 5, k1 y k2, podría ser conseguido por esta simulación.
:
Capturar y analizar la verdadera acción de Robot invertida (3)
Podemos capturar las variables de estado, postura y movimiento, de nuestro robot en el equilibrio. Y es posible duplicar en monitor de PC en tiempo real como una animación virtual en 2D de equilibrar el robot. Por otra parte, podemos examinar el efecto de sketch en detalle mediante el análisis de la serie temporal de variables de estado registrado. Un instructable en japonés ha sido publicado, en el que se captura, duplicación y análisis describen.
:
[Animación 2D en tiempo Real mediante la captura de Estado]


")


 centinela droide/Dancing Robot")



")



