Paso 4: Juntar los componentes eléctricos

Juntar los componentes eléctricos y coloque al cuerpo en el paso anterior. Entonces se consigue un robot sin programa .
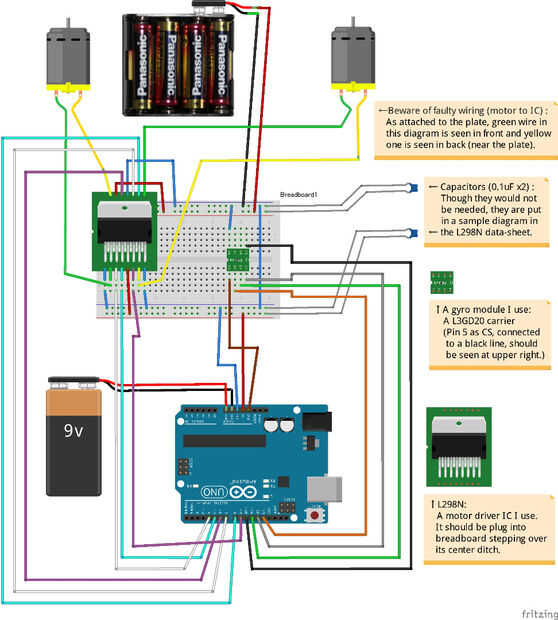
- Refiriéndose a la Nota 1 a continuación, ajustar dos líneas de pines del motor controlador IC (L298N) respectivamente
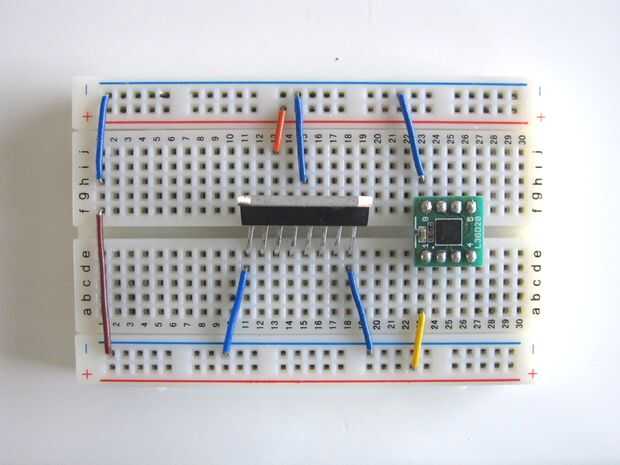
- Refiriéndose a la foto de la protoboard , conecte un módulo de giro y motor controlador IC en su protoboard
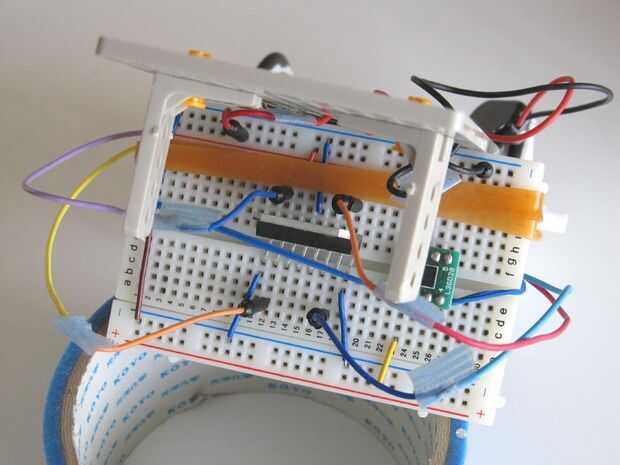
- Algunas bandas de goma alrededor de la placa del viento y colocar en los ángulos inferiores de L del cuerpo del robot
- Según un esquema de cableado anterior, conecte los cables puente en el protoboard
- También Conecte ambos cables del batería snap en breadboad, que se conectará a un sostenedor de batería 4AA
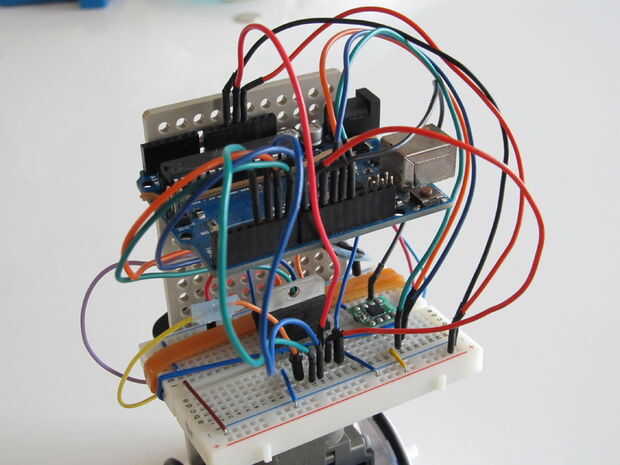
- Una pequeña banda de goma alrededor de Arduino de viento y Monte en los ángulos de L parte superiores del cuerpo del robot
- Según un esquema de cableado anterior, enchufe los cables de puente en los agujeros de alfiler de Arduino
- Inserte cuatro pilas AA para el soporte de la batería 4AA
- Viento una mayor banda de caucho alrededor del cuerpo del robot y fijar el soporte de la batería en la parte posterior del robot
:
[Tutorial para Paso4]
:
[Nota 1]
L298N debe enchufe en protoboard transzonales en la zanja de su centro. Pero dos líneas de pines de este IC no cuentan para esta conexión. Así que hacer dos ajustes para estos pines.
- Cortos pernos: cambiar la línea de pernos más cortos para la parte trasera del IC 2,5 mm (con una distancia mayor a la línea de pernos más largos)
- Más pasadores: desplazar la línea de pernos más largos a la derecha del IC por un poco
:
[Nota 2]
L298N tiene dos pernos (#1 y #15) para medir la corriente que fluye por cada motor respectivamente. Aquí no se mide corriente. Por lo que ambos están conectados a tierra.
:
[Nota 3]
El robot conseguido aquí no tiene ningún interruptor. Encendido/apagado, rápido de la batería es conectado/desconectado.


")


 centinela droide/Dancing Robot")



")



