Paso 6: Obtener una invertida después de Robot
Cuando el bosquejo muestra subido a Arduino en el paso anterior, usted debería obtener una invertida después de robot. Aunque necesita el dedo de pie, sigue con los dedos.
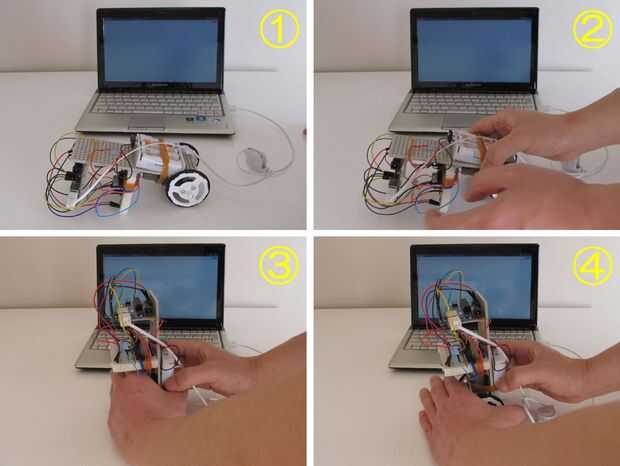
- Al terminar la carga, mantener el cuerpo de tu robot y recogerlo (ver cuadro 2)
- Conectar snap batería portapilas conectado a la parte posterior del robot
- Las ruedas del robot comience a girar, mantenga ambas ruedas apretado y parada de giro (ver imagen 3)
- Ambas ruedas en escritorio o en el piso y mantener estática permanente a centro de gravedad del robot que se encuentra en sus ejes de rueda
- Después de unos segundo, par del motor se convierte en ruido abajo y débil o canto "miii" se escucha
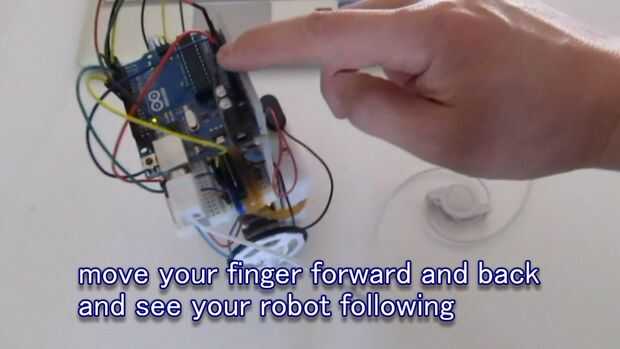
- Luego suelte suavemente las manos del robot (ver figura 4) y poner suavemente el dedo en la parte superior del cuerpo del robot
- Mueve el dedo hacia delante y hacia atrás y vea el siguiente robot
- Liberar el dedo y ver tu robot tratando de equilibrar, pero fallando
:
[Tutorial para Step5 y 6]
:
[Nota 7]
Como encender o restablecer Arduino, el robot percibe su postura (ángulo de su cuerpo) y gira sus ruedas cuando se cambia la postura. Entonces el robot se tiene que estudiar la postura correcta en estado bien invertido. Este robot está programado que si ha sido en el estado estático de 0.05 segundos que considera a sí mismo bien invertido.
Por lo tanto como sus ruedas a partir de spinning, debe tener ambos spinning ruedas apretado y parada. Y ejecutar la línea 4 a 8.
Además si usted no siente cambios en la línea 5, hacia abajo y débil ruido de los motores de esfuerzo de torsión, para 10 segundos de espera, el módulo giroscopio podría salida mal valor temporalmente o podría ser incompatible con el bosquejo de la muestra en el paso anterior.
En ese caso, debería ver "(2) salida anormal del girocompás" [en Comentario para módulo giroscopio] en el paso 1 en primer lugar. Y si utilizas algunas L3GD20 portador distinto módulo de Akizuki, usted debería ver "(3) equivalente o alternativa girocompás módulo" en el paso 1 y 6 de nota en el paso 5 también.
:
[Resolución de problemas 1]
Si las ruedas del robot no inicia giro en línea 3 de arriba, algunos cables defectuosos en caso se deben sospechar en primer lugar. Regrese a paso 4 y verificar cableado cuidadosamente. Otra duda es un módulo giroscopio defectuoso. Si sospecha, debería ver "Comentario para módulo de giro" en el paso 1.
Por otro lado, si el robot no sigue el dedo a pesar de las ruedas a partir de spinning en la línea 3, tres tipos de cableado defectuoso se deben sospechar: (1) cables de un motor se fijan enfrente, (2) giro módulo se encuentra invertida, (3) cables a los pines digitales del Arduino es incorrecto. Regrese a paso 4 y verificar cableado cuidadosamente.
Más si su módulo giroscopio salidas valor inconsistente con el bosquejo de la muestra en el paso 5, el robot no siga el dedo a pesar de la corrección del cableado. Si sospecha, consulte "(1) signo inconsistente de girocompás de salida" en el paso 1. Y si utilizas algunas L3GD20 portador distinto módulo de Akizuki, usted debería ver "(3) equivalente o alternativa girocompás módulo" en el paso 1 y 6 de nota en el paso 5 también.
:
[Referencia] Comprobación de una invertida después de Robot


")


 centinela droide/Dancing Robot")



")



