Paso 8: Cómo conseguir que un Robot equilibrio invertido
Aquí verás cómo hacer un robot de equilibrio invertido. Usted necesita modificar sólo dos líneas en el dibujo de muestra en el paso 5.
- Copia 3 líneas más abajo y pegarlos sobre líneas 76 y 77 en el bosquejo de la muestra (sobrescribiendo los)
vE5 = sumPower; 76A
xE5 = sumSumP / 1000; 77A
Copyright (C) 2014 ArduinoDeXXX todos los derechos reservados.
- Ejecutar paso 6 (sin un soporte de dedo en las líneas 6 a 8)
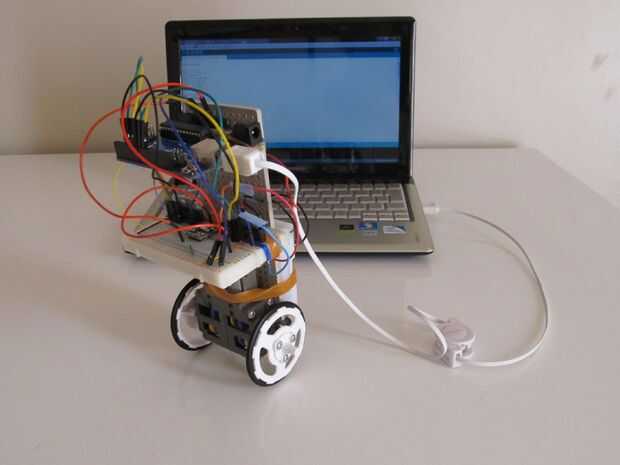
- Si centro de gravedad del robot se encuentra en cerca de sus ejes de rueda, el robot se mueve hacia atrás y hacia adelante por unos segundos y consigue postura bien invertido
- Ver que mantiene equilibrio de sí mismo
- Si se mueve con sesgo hacia adelante o atrás, agregar o enviar de entero adecuado después de la "energía" en el extremo de la línea 74 en el bosquejo original de la muestra
:
[Tutorial para paso 8]
:
[Resolución de problemas 2]
Si tu robot no se puede balancear bien a pesar de la ejecución paso 6 bien, "batería baja" en el soporte de la batería en la parte posterior del robot se debe sospechar en primer lugar. Si no se observa, deben cambiarse valores constantes en las líneas 10 a 13 en el bosquejo de la muestra. Creo que la línea 12 es más crítico.


")


 centinela droide/Dancing Robot")



")



