Paso 2: Prueba de todo
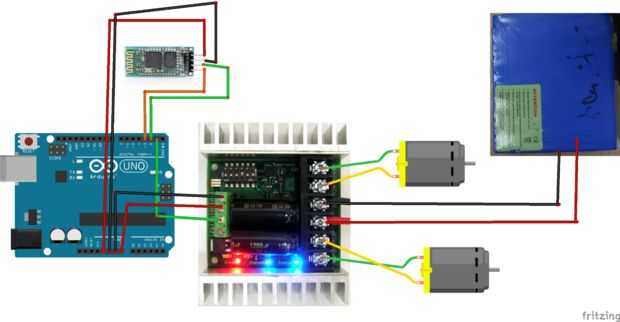
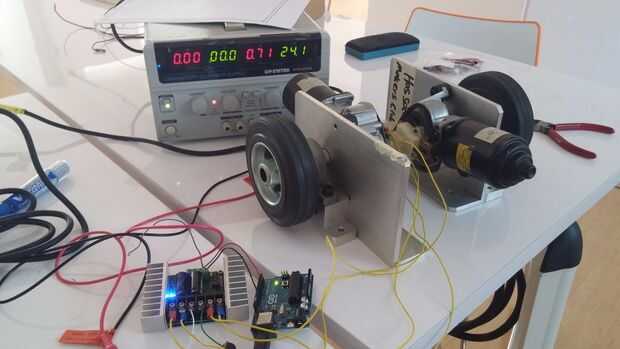
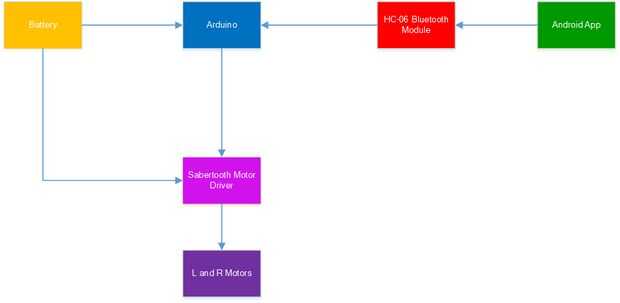
La primera cosa a hacer es probar de todo primero. Arduino está conectado a un tablero que tiene el módulo Bluetooth HC-06 y el sabertooth conductor del motor de 24V alimentación el controlador de motor. Soldadura/Crimp tenedor y empuje los conectores de fácil desconexión/conexión de los motores. Recuerde utilizar cables lo suficientemente gruesos. El programa de arduino puede descargarse aquí. Lo que hice fue simplemente conectar los motores directamente a la fuente de alimentación. Cuando todo funciona, es hora de intentar que el arduino a través del controlador de motor el motor de interfaz. Si está utilizando el controlador de motor de sabertooth, he escrito un código de arduino sencilla para él. Utilice Final3.ino si utiliza un MOSFET de la energía, tienes que modificar el código para la salida PWM analogWrite para el MOSFET. Si todo está bien, pasemos al siguiente paso.
-> Controlador de motor Vin + 24V / + 12V
Tierra de conductor del motor -> Arduino tierra y tierra de la batería de alimentación de energía
Salida de 5V de conductor del motor (si presentes, si no conectar el arduino al USB) -> Arduino Vin
Arduino Pin 1 -> controlador de Motor S1
Arduino Pin 2 y 3 -> Bluetooth Tx y Rx para Arduino
Tierra y Arduino 5V -> Bluetooth Vcc y tierra
Nota: Si está utilizando el mismo controlador de Motor como yo, he puesto los puentes como:
1 - off
2 - en
3 - en (para batería de litio protección, sólo si está usando baterías de litio, de lo contrario, establézcalo en off)
4 - en
5 - off
6 - en
Siga las instrucciones del respectivo conductor motor que usas para obtener más información
Edit: lo anterior es incorrecto. Utilice la configuración siguiente.
1 - para arriba
2 - abajo
3 - para arriba
4 - abajo
5 - para arriba
6 - para arriba
Esto funciona para mí así que usted puede intentar esto también si lo anterior no funciona.













