Paso 4: Programación y configuración
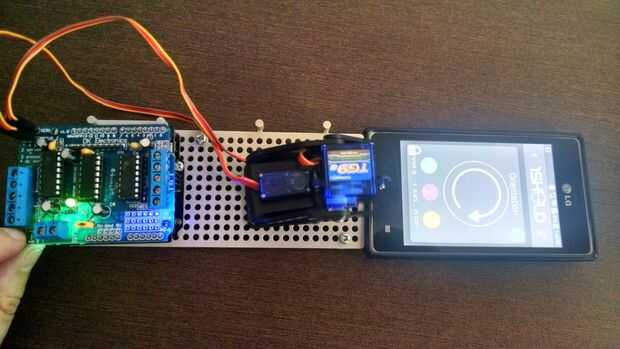

Con la biblioteca de orientación de 1Sheeld, el programa de Arduino Lea el eje X e Y de su teléfono celular y traducir a la posición angular de cada servomotor.
Un detalle importante es que cada celular tiene un diferente origen o referencia para los ejes X, Y, Z.
He puesto una declaración en la rutina de instalación de Arduino para hacer la referencia "cero" de acuerdo con el posicionamiento de su teléfono celular.
En la primera vez que necesita poner el celular en posición horizontal, alineado con el dispositivo de inclinación y luego presione el botón de reset en Arduino (en el escudo del Motor es más fácil porque está montado sobre la parte superior del escudo juntas).
Después de esto se hace referencia a la inclinación para seguir el posicionamiento de su teléfono celular!



 en un SUPERGADGET-MICROORDENADOR")









