Paso 1: Arquitectura del sistema
Hardware:
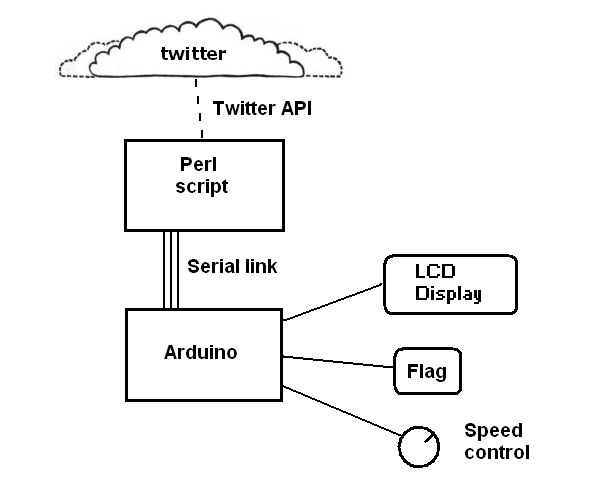
El hardware de forma interfaz de Arduino con el mundo real. El hardware consiste en un LCD de caracteres dos líneas para la visualización de mensajes, un control de velocidad que permite haces cambiar la velocidad de desplazamiento mientras el dispositivo está funcionando y una bandera de servo-operado que se plantea cuando el script detecte hay tweets sin leer.
Firmware:
El sketch en Arduino ejecuta un bucle hacer dos acciones principales. Envía una solicitud de "status" a la secuencia de comandos se ejecuta en el servidor PC y espera una respuesta que contiene el número de tweets en la lista y si hay cualquier no leídos. Entonces, envía una solicitud de "mensaje", obtiene el texto de un tweet y lo muestra en la pantalla de desplazamiento. Lee el potenciómetro en tiempo real para obtener la velocidad de desplazamiento deseada y sube y baja la bandera para notificación de nuevos tweets.
Software:
El software de servidor mantiene una lista de todos los tweets desde empezó a correr. Cuando el script recibe una solicitud de "status" responde con el número de tweets que tiene actualmente en la lista, y si hay cualquier tweets sin leer. Cuando recibe una petición de "mensaje" el script envía el tweet siguiente en la lista, volviendo al principio de la lista cuando llega al final de la lista o cuando encuentra nuevos tweets.
El script también tiene que mantener la lista de tweets al día comprobando la API de Twitter para conseguir los últimos mensajes. Esto también es programado para ocurrir en la mayoría una vez cada tres minutos: cuando el script recibe una solicitud de "status", si han transcurrido más de tres minutos desde la última revisión, obtiene la lista de tweets y comprueba si hay cualquier no leídos.













