Paso 2: Doblar y mecanismo
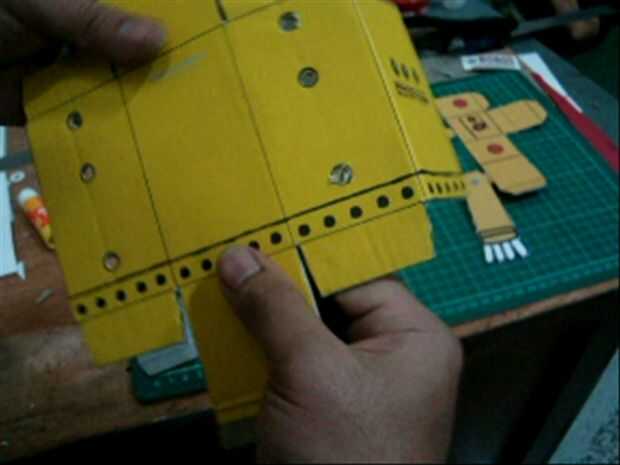





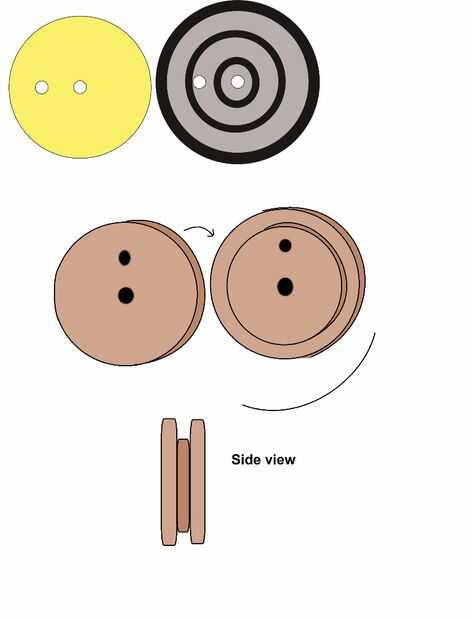
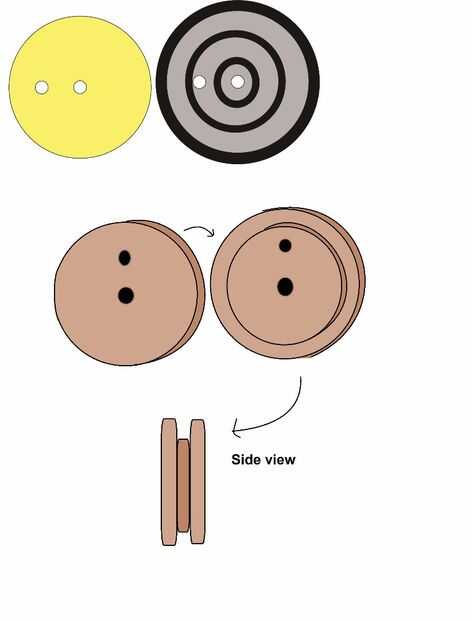



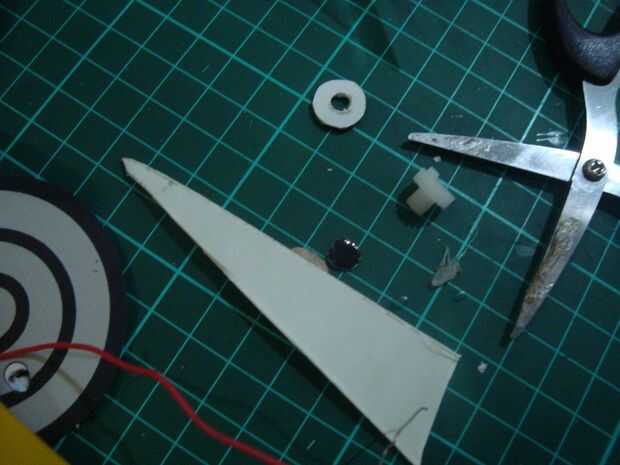












doble en las líneas existentes en la imagen, la sección del cuerpo de la forma en plazas como la cabeza. también en el doblez lejos, doblar de que la parte inferior del pie se encuentra en el robot, después de la parte inferior doblado pegar en dos capas de cartón sobre los pies, el pegamento en la conexión de papel. para hacer dos piezas de las ruedas de las ruedas grandes y una pequeña rueda paso (imagen del círculo amarillo) pasta la rueda pequeña para las ruedas grandes iguala los orificios de la rueda y luego superponer el ya las ruedas grandes, así que hay tres capas y capas de media rueda es un pequeño wheel.look en el cuadro de skema.
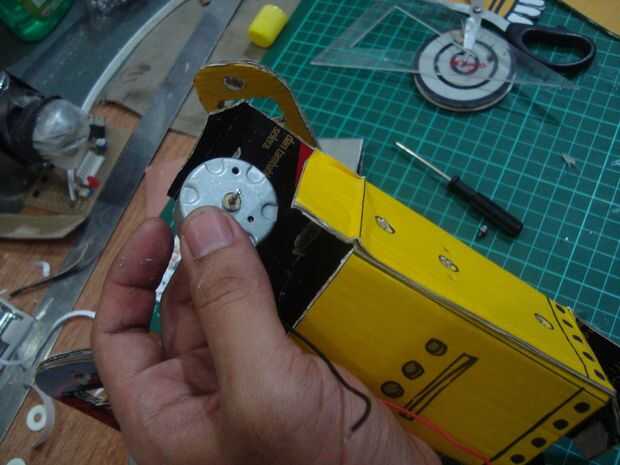
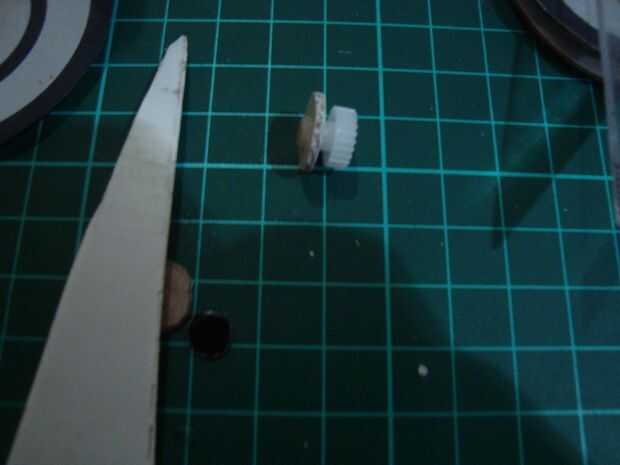
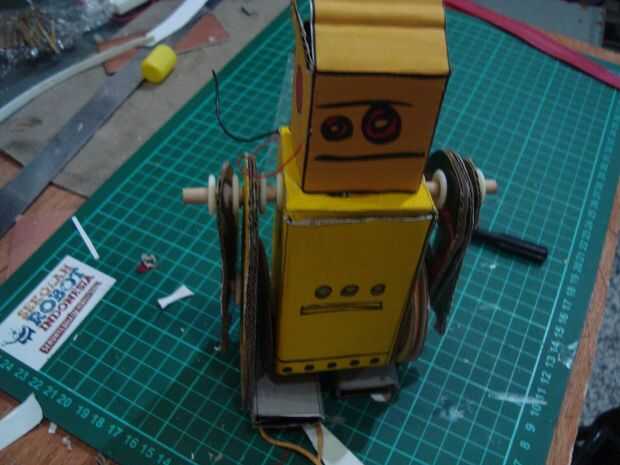
Enchufe el motor de la c.c. en un cuadro del cuerpo robot julio de entrada en los orificios existentes ver fotos, sostenga con screw.prepare una marcha anterior del pequeño juguete puede ser montada en el motor, hacer una pequeña placa de anillo julio de plastis (utilicé una tubería de agua de pvc) tapón en la rueda de engranaje formando pequeños catrol, poner en el motor julio.
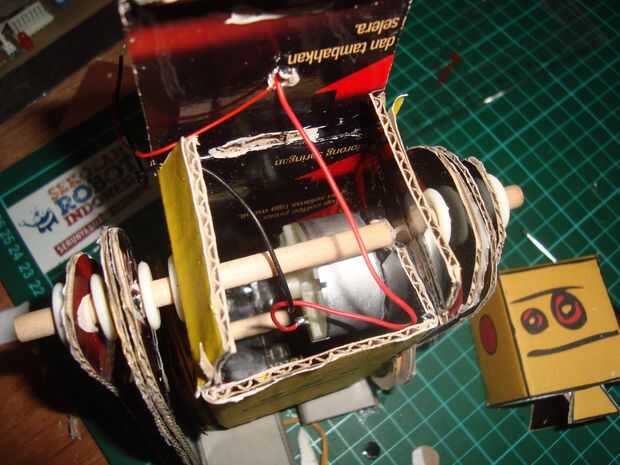
cortar los palillos 12cmm, 10 cm y 2 piezas de 2 cm. tamaño 12 cm los palillos para pinchar un agujero en la parte superior cuerpo y 10 cm en la parte inferior del cuerpo agujero. colocar las ruedas en la parte inferior de los palillos a cada lado de la rueda, que consiste en tres capas de cardboar en pares a cada lado del motor existente. poner una banda de caucho en la rueda de catrol Julio motor y rueda del robot. Ponga que un trozo de 2 cm de los palillos en el hueco de la rueda está en el lado de la rueda. (mirar la imagen)
el siguiente paso colocar la pierna izquierda y su derecha, el agujero en la base del brazo robótico montado en la parte superior de los palillos y agujeros largos colocados en pie de los palillos que se encuentran en las ruedas (ver en la fotografía). no te olvides de instalar un anillo de plástico en los palillos para que no se mueva. también Coloque las manos en la parte superior del soporte de palillos con anillo de plástico.
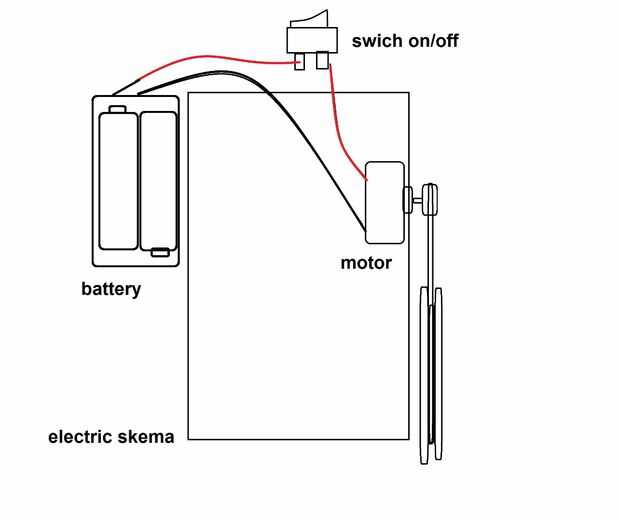
Eléctrico:
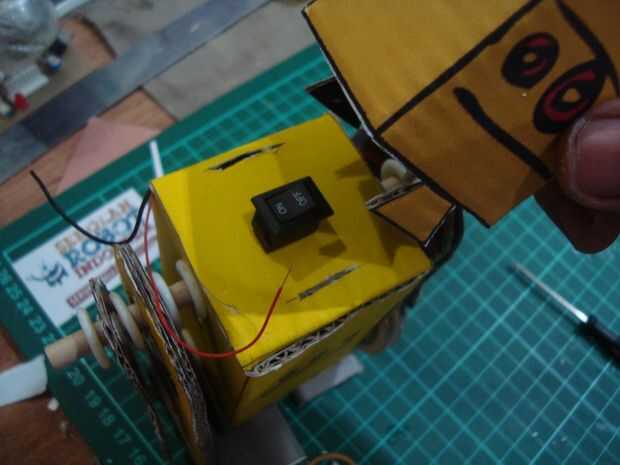
Conecte los cables del motor en/off swich y la batería, ponga el interruptor en la cabeza y la batería la parte posterior de la robot.now adjuntar la prueba y venció nuevo, deslice el interruptor si la pierna de trabajo se hace. el último par de cabezas y permitir que el interruptor se encuentra en la cabeza del robot. y ahora es el momento que terminamos trabajo de robot en acción.




")








